Sincerely,
Mars Pathfinder Microrover Telecom Team
Pathfinder is going to land a single vehicle, which we call the Lander, on the surface of Mars on July 4, 1997. Once there it will carry out a number of engineering, technology and science experiments. A primary technology objective for Pathfinder was to demonstrate a low cost cruise stage and the Entry, Descent and Landing (EDL) systems required for putting a payload safely on the Martian surface. The Mars Pathfinder lander was built at a cost of $171 million , this includes the $25 million cost to build the microrover.
The Mars Pathfinder spacecraft was Launched from Kennedy Space Center at 1:58 a.m. EST on December 4, 1996. It is on a Type 1 Earth to Mars transfer trajectory which will take it about seven months to get there. During its trip to Mars there will be four corrections made to its trajectory. These are called Trajectory Correction Maneuvers or TCM's and are used to adjust for things like launch injection errors, small previous TCM errors and any other trajectory vector errors. Also, the final TCM (the last of which occurred on June 25th) will ensure that the spacecraft will enter the proper 14.2° Mars atmospheric descent angle, not too steep or too shallow. EDL is a very complex chain of events that must take place exactly in order for the landing to be successful. During this time spacecraft data is sent back to Earth in the form of semaphores (more specifically, shifts in the RF carrier & sub-carrier when certain events occur). These semaphores are a kind of Morse code that we will decipher to tell if the chain of events took place as planned. A FSR (Full Spectrum Recorder) is used to detect the weak radio signals. The Madrid Spain Deep Space Network (DSN) facility (and for a brief time the Goldstone DSN site) will be the first station to acquire these signals and Pathfinder mission operations engineers from JPL will be on station there to analyze these signals. In addition, a whole array of measurements are made inside the lander during descent, which will be stored in memory for later transmission to earth. Careful analysis of this engineering data a few days later will provide a clear insight into what the lander experienced during its 4.5 minute trip to the surface.
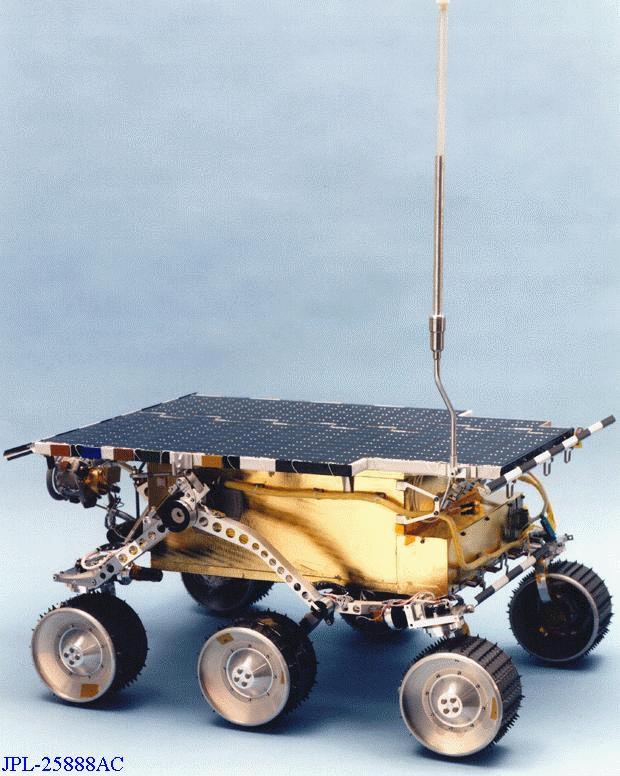
Sojourner is the name given to the first robotic roving vehicle to be sent to the planet Mars. Sojourner weighs 11.0 kg (24.3 lbs.) on earth (about 9 lbs. on Mars) and is about the size of a child's small wagon. The Microrover has six wheels and can move at speeds up to 0.6 meters (1.9 feet) per minute. This isn't very fast, but during the course of a day on Mars the Microrover can cover a lot of territory (perhaps up to 3 meters). However, that speed will be fast enough to accomplish many tasks during a day, since we are not planning on driving the Microrover more than 10 meters (32.8 feet) away from the lander.
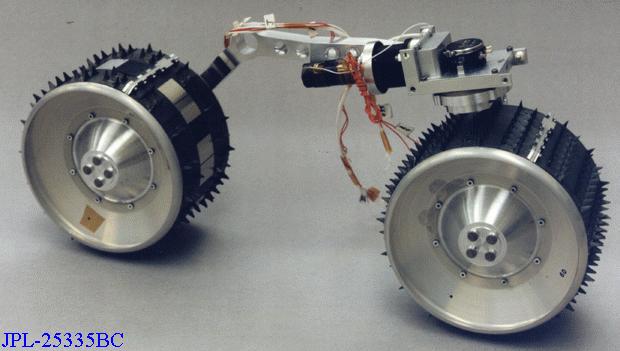
The rover's wheels and suspension use a rocker-bogie system that is unique in that it does not use springs. Rather, its joints rotate and conform to the contour of the ground, providing the greatest degree of stability for traversing rocky, uneven surfaces. A six-wheel chassis was chosen over a four-wheel design because it provides greater stability and obstacle-crossing capability. Six-wheeled vehicles can overcome obstacles three times larger than those crossable by four-wheeled vehicles. For example, one side of Sojourner could tip as much as 45 degrees as it climbed over a rock without tipping over. The wheels are 13 centimeters (5 inches) in diameter and made of aluminum. Stainless steel treads and cleats on the wheels provide traction and each wheel can move up and down independently of all the others. Three motion sensors along Sojourner's frame can detect excessive tilt and stop the rover before it gets dangerously close to tipping over. Sojourner is capable of scaling a boulder on Mars that is more than 20 centimeters (8 inches) high and keep on going. (Ref:JPL 96-207 p.32)
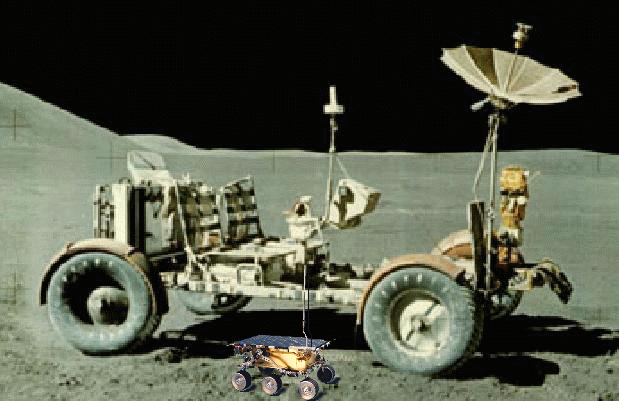
NASA has an impressive history of building roving vehicles. The US first roving vehicle used for space exploration went to the moon on Apollo 15 and was driven by astronauts David R. Scott and James B. Irwin. Two other Lunar Roving Vehicles (LRV) also went to the moon on Apollo 16 and 17. These rovers were battery powered and had radios and antenna's just like Sojourner. But unlike Sojourner, these rovers where designed to seat two astronauts and be driven like a dune buggy. Sojourner will be more autonomous and receive remote command sequences from engineers on Earth instructing it where to go . Here is an image (to scale) showing Sojourner and an Apollo LRV side by side. Notice any similarities or differences?
The primary function of Sojourner is to demonstrate that small rovers can actually operate on Mars. The Russians placed a remote control vehicle on the moon called Lunakhod 1 (Luna 16). It landed on November 11, 1970 and drove a total of 10.5 Km and covered a visual area of 80,000 square meters during which it took more than 20,000 images. Even though there was only a 3 second signal delay, that rover proved very difficult to drive. Sojourner will be humanities first attempt to operate a remote control vehicle on another planet. After landing, Sojourner will stand up and drive down one of the two ramps mounted to the lander petal. A lander IMP (IMager for Pathfinder) camera mission panoramic image as well as images taken on either side of the rover petal will assist the mission operations engineers in deciding which ramp is safest to drive down. After a successful ramp egress we will begin a nominal 7 sol (1 sol = 1 Martian day) mission to conduct science and technology experiments. This mission is conducted under the constraint of a once-per-sol opportunity for command and telemetry transmissions between the lander and earth operators. Communications with the rover is not done in real-time because of the approximately 11 minute light-time delay in receiving the signals. Sojourner must be able to carry out her mission with a form of supervised autonomous control. This means that goal locations (called waypoints) or move commands must be sent to the rover ahead of time and Sojourner then navigates and safely traverses to these locations on her own.
Sojourner will perform a number of science experiments to evaluate its performance as a guide to the design of future rovers. These include:
Also, Sojourner will perform a number of specific technology experiments to evaluate its own performance as a guide to the hardware/software design for future rovers as well as assisting in verifying engineering capabilities for Mars rovers. The technology experiments are listed below:
After the first Mars sol, which will be devoted to the release and deployment of Sojourner from the lander and the acquisition of an APXS measurement on soil, the rover will perform more and varied measurements. The next two Martian sols will be used to acquire an APXS measurement of some rock near the lander. Along the way to the rock, a soil mechanics technology experiment will be performed. With continuing success, sols 4, 5 and 6 will be devoted to positioning the APXS for measurement of a specific rock: the rock selected through an evaluation of the panoramic image of the landing site taken by the lander IMP camera. In addition, stereo images from the rovers front cameras and rear color camera will be taken of rocks, soil and terrain to assist in the terrain reconstruction at the landing site. Images of the lander will be taken in an attempt to complete a full survey. The last day in the 7 sol nominal mission will be devoted to ensuring data has been collected for all the technology experiments.
After sol 7, if it is decided to continue with rover operations, we will enter into what is known as the 'extended 30 day mission'. An extended mission will be much more conservative because the 3 strings of rover batteries, which are not rechargeable, may become depleted limiting it to solar power only. In that case, the rover will totally shut down at sunset and be incapable of performing any nighttime operations (like APXS measurements). When the sun rises on Mars and there is enough solar energy to power the rover, it will wake up, boot its software from memory and send a signal to the lander saying it's ready for commands. We can then uplink a rover operations sequence and proceed with normal operations during the day. Seven or more successful days of Mars surface operations will provide earth's scientists with a wealth of new Martian geologic information and add to our knowledge of the red planet.
{kind=link}
{kind=link}
{kind=link}
{kind=link}