Microrover Mission Milestones
Rover Telecom Lessons Learned
What is Sojourner doing now?
What happened to the Rover Telecom System on Sol 1 & 2?
How do the radio modem telecom protocols work?
How does the lander telecom system communicate with Earth?
How far is the communications range of the rover?
What is the communications delay between Earth and Mars?
Why are the rover batteries not rechargeable?
How long can the rover keep functioning on Mars?
Can I get schematics and engineering drawings of the Microrover?
Where can I download Rover and Lander Images?
Does the Lander or Rover have a microphone for recording sounds?
Will the Rover be coming back to Earth?
Will the Rover collect soil samples?
What kind of computer is in the Rover and Lander?
Where can I get a pair of 3D glasses?
To get to the Live From Mars Frequently Asked Questions site click HERE. This site has dozens of answers to FAQ's about Mars and Mars missions. Also, to hear the daily report on the Mars Pathfinder Mission from North America call 1-800-391-6654 and press 3. Other mission reports are also available at that number.
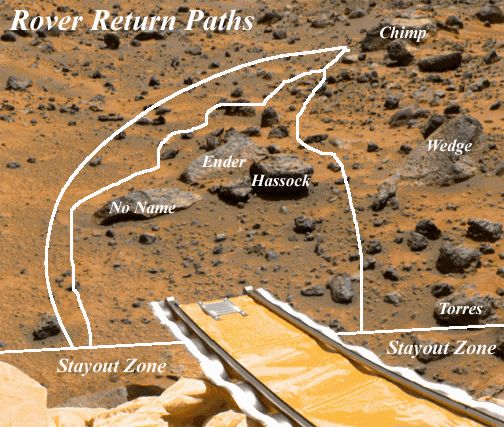
When the lander problems began, the rover was at a rock named Chimp, where it had performed an APXS measurement on Sol 81 and 82. Chimp is about 9.3 meters radially from the center of the lander. The drive back to the lander could have taken several different paths. One possibility is that the rover drove in an arcing turn toward the lander as shown HERE. Note, the forward ramp is inside the 3 meter stayout zone. In another possibility, the rover would have executed a left turn and made a beeline to the lander. This path would have possibly taken it between the rocks named Hassock and Wedge. However, the rover uses its hazard avoidance to drive around rocks, so if it encountered any nearer rocks, particularly Ender, first it would have tried to drive to either side of them depending on its assessment of the hazards. If it got past those obstacles (located about 4.5 meters from the lander) without any severe driving (articulation) errors it could have arrived at the lander in the vicinity of either the forward ramp or near Torres rock. If it made it to the 3 meter virtual wall, it would have stopped and then tried to drive around the wall like any other hazard. But since it's onboard software won't let it go beyond the 3 meters, the rover will begin to drive around the lander following an arcing circular path. Since the rover has inherent drift in its gyros and somewhat noisy accelerometers, its autonomous driving may incur heading errors. Depending on how long the rover is driving, the accumulated heading errors may cause it to spiral toward or away from the lander, possibly getting it into trouble. In it's driving around the Lander, Sojourner could have accidently driven up onto a rock and received a traverse error that would have stopped it. If that has happened then the rover will be parked in that one spot, never to move again on her own. Without any hard data, these scenarios are mere speculation based on how we know the rover operates. In reality we just don't know and may never know where Sojourner is and what she's doing right now.
Sol 1 Rover Telecom Scenario:
The rover woke up via lander reed relay at 06:59:13 TLST as expected and immediately produced erroneous level 2 health check telemetry caused by a known +12V regulator (A/D converter) problem not related to the radio modem. The first level 2 health check data was unusable and a subsequent commanded level 3 health check (cmd 1034) was performed (291 bytes) at 07:35 TLST. Telemetry from the rover health check indicated that the telecom system was working nominally with a modem operating temperature of -4.0 degree C. At approximately 7:40 TLST the lander LGA downlink session had ended. It was noticed from 7:38 to 9:21 TLST that the LMRE (Lander Mounted Rover Equipment) link quality, which is a measure of how well it is receiving good data frames (1 complete frame = 6 byte ACK + 250 bytes of data) from the rover, dropped to 44% and continued to degrade to 14%. After that point no more good data was received from the rover for the remainder of the sequence. A large number of garbled frames (ones containing CRC errors), however, continued to be received by the LMRE modem which indicated that the rover modem was still transmitting, and had not completely failed. During this period when rover communications degraded, the lander switched from the low gain antenna to the high gain antenna after doing a sun-search with the IMP camera. Also, the lander +Y petal was elevated to 45°, an air-bag retraction sequence was run, and the petal was returned to a horizontal position. All during this time the rover was in the stowed configuration on the petal with its antenna down. Lastly, it was decided not to deploy both rover ramps that day and wait until Sol 2 to perform the rover release, standup and egress down the rear ramp.
Sol 1 Considerations:
The following have been considered and discounted as communications problems:
The following are the most likely contributors to the communication degradation problem:
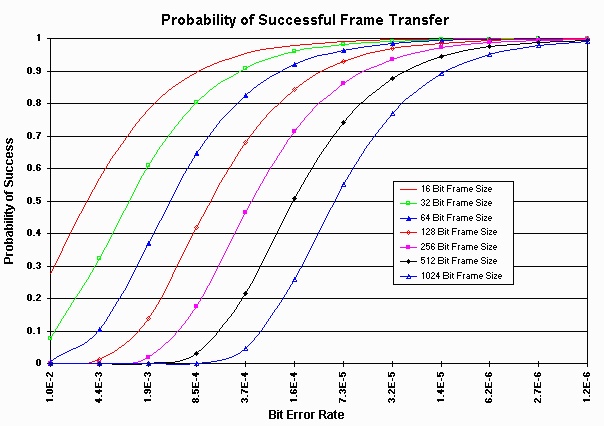
The protocol at the data-link layer used on the UHF link between Sojourner and the Pathfinder lander is of the acknowledge/negative-acknowledge (ACK/NAK) type. There is no forward error correction channel coding whatsoever. The response of ACK or NAK is dictated by a cyclic redundancy character (CRC) check computed over the contents of each transmission frame. A frame generating a NAK can be retried up to three times before the software errors-out and skips to the next frame in the transmission queue. ACK/NAK protocols are very simple to implement and permit confidence in the fidelity of the data transfer when signaled by the ACK confirmation, but they are extremely fragile data-link layer implementations: that is, the throughput of the link can collapse catastrophically for small incremental changes in the bit error rate (BER) of the physical layer. Click on this graph to see how quickly the probability of receiving different size data frames can change with just a small change in BER performance.
The maximum frame size used on the UHF link between the Sojourner rover and the Pathfinder lander is 256 bytes, and examination of the graph shows a rapid collapse of communications throughput for bit error rates exceeding approximately 10-4. Note also that short frames (those of length less than 256 bytes) can get through with high probability even when those of maximal length are likely to fail. It was this phenomenon that was frequently observed on Sol 1 and 2: short frames got across; fully stuffed frames did not. Clearly the communications problem was not one of hardware failure or even of hardware intermittency, it was mainly an increase in bit error rate that was coupled with an extremely unforgiving data-link layer protocol.
Sol 2 Rover Telecom Scenario:
During the night of Sol 1 the lander experienced a software reset which, it was concluded, did not affect the quality of the lander to rover UHF link. Also, it has been concluded that switching between both LMRE modem DC-DC converters had no corrective effect. It is likely that because of configuration differences with the location of the HGA and IMP that scattering/multipath conditions at the beginning of Sol 2 had changed. The changes may have made the communications environment favorable enough to allow reception to occur.
The rover woke up nominally via alarm clock on Sol 2 at 07:01:53 TLST with no A/D problems. The small packet size command sequences for Sol 2 were received normally by the rover. This indicated that the rover was able to receive data without any problems and it then began transmitting data to the lander. Its first level 2 health check showed that its modem temperature was at -30C, much colder than the day before because no modem heating was performed. The rover was still stowed on the petal with its antenna down. Data was apparently buffered on the rover overnight when comm with the lander was lost. A total of 31,491 bytes of sequence data were received. This coincides with the amount of EEPROM available for buffering data (32K). All indications are that the rover continued to perform runout or commanded sequence but had no place to buffer the additional data. The rover UNSTOW (cmd 2520) command executed nominally at 11:47:55 TLST. At that time the rover UHF antenna was deployed and a co-polarization condition existed between the rover and lander antennas. LMRE Link quality was marginal, and remained at about 40% until rover egress. During the second downlink pass no rover data was received because a mistake in the lander sequence turned off the LMRE radio from 8:01 and 11:29 TLST. This was reflected in the rover telemetry as an increase in timeout errors as the rover attempted to communicate with the lander which was not receiving. In downlink session 3 the rover was executing the remainder of its final Sol 2 sequence which included the petal egress move down the rear ramp.
The traverse down the rear ramp is executed with two 1000mm MOVE commands. After confirmation of the first MOVE command, which would have placed the rover half way down the ramp at 14:40 TLST, communication with the rover ceased. Rover telemetry at that moment showed the modem temperature to be +30C. Lander data indicates that the rover continued trying to communicate with the lander for another 16 minutes (trying every 10 seconds to send the second 3628 byte MOVE command and other commands) until the rover executed a SHUTDOWN command at which point the lander no longer heard from the rover. Lander data also indicates that at that time the LMRE link quality had degraded to 27%. With 100% link quality, it should have taken just 12 seconds to receive the second move command. At a lower link quality it would have taken significantly longer to receive. Being unable to send the MOVE command data, the rover buffered that data to memory. From examination of the rover sequence (50250V), after the rover performed the second MOVE command, it was commanded to HOLD_COMM and deploy the APXS onto the soil. After that was done, HOLD_COMM was removed. Note, it is a requirement that rover communication be suspended during APXS activities because a +9V DC converter is switched from the modem to the APXS (both can't operate at the same time). With 6 wheels on soil and in a slightly different location after the final MOVE, the rover then successfully transmitted some of its buffered telemetry data to the lander, including a rover image taken of the front ramp. The rover performed an auto shutdown at 19:08 TLST and remained silent (no communication) for approximately 18 hours and took two APXS spectra of the soil.
Sol 2 Considerations:
The following have been considered and discounted as communications problems:
The following are the most likely contributors to the communication degradation problem:
Again, based on these two key factors listed above and the sensitivity of the rover protocol layer to BER we feel that it was an individual factor or combination of these factors which resulted in the degradation and unexpected loss of radio communication during the remainder of the Sol 2 sequence.
Sol 3 Rover Telecom Scenario:
The rover woke up nominally on Sol 3 using solar power at 05:27 TLST. The command sequence for Sol 3 was queued on time and sent to the rover. The rover radio modem was much warmer (-15C) at wake up on Sol 3 than Sol 2 because of the execution of a modem heating command. The two overnight Sol 2 APXS spectra were received by the rover, as well as the remainder of the final Sol 2 telemetry. The Sol 3 sequence performed very well , with the rover positioning its APXS on the rock named 'Barnacle Bill' for the night. LMRE Link quality steadily improved throughout the day and into the night, with the improvement in link quality being related to the rover moving out of the region of scattering/multipath by the lander, and its modem operating temperature being above +25C. The only problem relating to telecom was 15 lost packets of rear image data with all other data successfully sent.
Conclusions and Operational Recommendations for the Mission:
Initially, all rover telecom problems were caused by a combination of environmental and configuration conditions. At no time were there any electrical, mechanical or software interface failures with either the LMRE radio modem or Rover radio modem. LMRE modem UART interface resets occur periodically, and are a normal part of operation on that side of the interface. Rover modem resets occur when the rover performs a SHUTDOWN or any APXS related activities in its sequence, which requires a HOLD_COMM command. Note, the only factor which has not been conclusively ruled out is the possibility of the loss of hermeticity in one of the four crystal local oscillator cans used in the modems. The crystals utilize a solder perform hermetic seal between the base and body of the can, in a 1 atmosphere inert gas. A failure of the hermetic seal would definitely shift the crystal's frequency (on Mars) because of the change in pressure inside the can. According to the manufacturer, a 5 PPM change in the resonant frequency of the crystal equates to about a 2 KHz frequency shift of the output frequency. But, based on the recent operation of the telecom system, and a comparison of pre-delivery thermal test data performed at JPL and thermal data from Mars, the probability of loss of hermeticity is low. If it has occurred, the consensus is that the LMRE receive LO crystal may be the culprit. To thoroughly understand how a loss of hermeticity would shift the operating frequencies of the radios, an experiment could be performed on a group of modems at different pressure levels, and with the loss of hermeticity invoked in combinations of the crystals. This experiment would be time consuming to perform and give insight into only one problem associated with the function of the radio modems.
It should be noted that the aging process of the LO crystal has been examined carefully. Pre-launch lab measurements of three spare radio units showed that the aging rate is consistent with expectation for that design, namely a negative drift in the output frequency that is logarithmic in time; linear on a log-scale of time.
For present and future Sojourner rover telecommunications activities, here are the recommendations for hardware usage and when planning operations sequences:
Most of the these recommendations have already been communicated to the Mars Pathfinder project and implemented as part of rover operations. They have proved to work leading to significant improvements in the functioning of the Sojourner telecommunications subsystem.
These radio modems use the standard RTS/CTS handshake method, similar to modems used in personal computers. The standard interface on these radios is RS232, however, the RS232 converter chip on the digital board has been replaced with jumpers so that 0-5 v TTL levels could be used with the rover and lander computers. The radios are hardwired for 9600 bps asynchronous communication with 8 data bits and 1 stop bit.
The atmospheric pressure on Mars is between 6 and 10 Torr (units of Torr are mm Hg @ 0C and 1 Torr = 1.33X10-3 bar), compared to 735.56 Torr (at sea level) for atmospheric pressure on Earth. Here are two equations that are frequently used to calculate sound levels. The first equation is for acoustic pressure levels and is equal to 20 log10 (P/Pref) in decibels, where P is the pressure in the medium and is a function of the density of that medium, and Pref = 2X10-10 bar is the equilibrium pressure. The equation for sound intensity levels is 10 log10 (I/I0) also in decibels, where I0 = 10-16 watt per square centimeter. Pref and I0 are reference pressure and intensity values which both correspond to near absolute silence (no pressure changes). Both equations are logarithmic and this is convenient because the sensitivity of the human ear is roughly logarithmic. One thing to note is that on Earth, the pressure changes that create sounds are very small compared to the overall atmospheric pressure.
Here are the A-weighted RMS (root-mean-square) pressure levels of a few common sounds:
Even the thin atmosphere on Mars supports the propagation of sound waves. But because of the lower pressure, the same sounds would have to be more intense (displace more atmosphere) for a typical microphone or human ear to hear them at the same level as here on Earth. For instance, given the same distance between the sound source and destination (say 10 feet), the reduction of pressure by a factor of 10 would reduce the sound pressure level by 20 dB. The reduction of pressure by a factor of 100 would reduce the sound pressure level by 40 dB. The pressure on Mars (at ground level) is approximately 100 times less than the atmospheric pressure on Earth (at sea level).
Using the same reference pressure level of 2X10-10 bar, here are the equivalent Martian sound levels for the same common sounds on Earth:
As you can see, for the same given distance, the sound of an electric table saw on Mars would be perceived as loud as a normal conversation here on Earth. The design of a dynamic microphone or some sort of acoustic sensor to function in the harsh Martian environment could definitely be accomplished, as could the design of an audio frequency amplifier with 40 dB more sensitivity to the lower sound levels. So it is entirely possible to measure and record sound on Mars, but the scientific return is probably not high enough to justify flying the extra equipment weight.
The lander computer on the other hand has much more computing horsepower. Its 32-bit RISC CPU and architecture is the derviative of a commercially available IBM 6000 computer. It executes at about 20 MIPS. The lander also does not have a hard disk, but has a rather large 128 MB of DRAM where data and images can be buffered for transmission back to Earth. Like the rover, it also uses radiation hardened components on its computer board.
{kind=link}
{kind=link}