These radio modems operate, in many ways, just as walkie-talkies do. However, instead of sending and receiving voice, these radios send and receive data in the form of digital symbols. The radio modems transmit short bursts of data symbols, termed "packets", each consisting of 2000 eight-bit bytes. On Mars, the data packets will transfer rover camera images and engineering telemetry detailing the operational status of the rover, as well as commands from Earth. Like walkie-talkies, the radio modem can either talk or listen at any given time, with the direction of the flow of information between the rover and the lander being controlled by the rover radio modem using a communication protocol called "half-duplex operation". In other words, the rover itself starts the telecommunication sessions with the lander, so most of the time the LMRE radio is in the receive mode.
There are two main parts to these radio modems: the digital portion on one printed wiring board, and the analog portion on a separate circuit board. The digital board acts as an interface between the analog board and the computer inside the Sojourner rover (or the computer inside the Pathfinder lander). This digital board processes the data to be sent and received, and directs the communication protocol, that is, when to talk and when to listen. The analog board, when transmitting data, turns on its 459.7 MHz UHF transmitter and sends out modulated radio waves which correspond to the digital information formatted by the digital board. During receive, the analog board is tuned to radio waves that are the same 459.7 MHz frequency. It amplifies and filters them, and extracts, in a process called demodulation, the digital symbols in such a way that the digital board can input each information bit within a packet as it is received.
The rover radio modem also has a 0.5 W heater attached to its metal frame. This heater is used to raise the rover radio modem's temperature in the early hours of the Martian morning in preparation for the first telecommunication session of the day. This heater was added to the rover radio modem because its crystal oscillator (and that of the LMRE radio modem as well) is not temperature-compensated, allowing the transmit and receive frequency of the radio modem to change with temperature. As the radio modem temperature gets warmer, the transmit and receive frequencies increase; as the temperature gets colder, the frequencies decrease. The maximum permissible frequency shift is on the order of 5 kHz. Testing has shown that when the lander radio runs at about 0°C, the fewest communication transmission errors occur when a temperature difference of 20°C or less is maintained between the rover and lander radio modems. This will be accomplished in part by monitoring the engineering telemetry and issuing commands from Earth to control power to the rover radio modem heater. Typically the lander battery temperature and therefore LMRE modem temperature, will be between 20°C and 30°C for daily operations, so with the rover modem temperature running between 25°C and 40°C we can maintain a temperature difference of less than 20°C. This will be accomplished in part by monitoring the engineering telemetry and issuing commands from Earth to control power to the rover radio modem heater.
Specifications
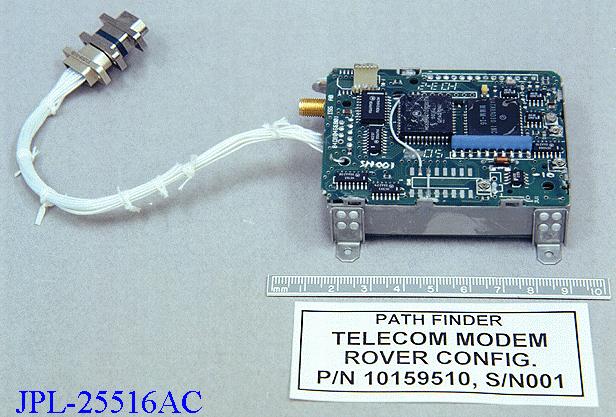
Flight Rover Radio Modem Hardware Images
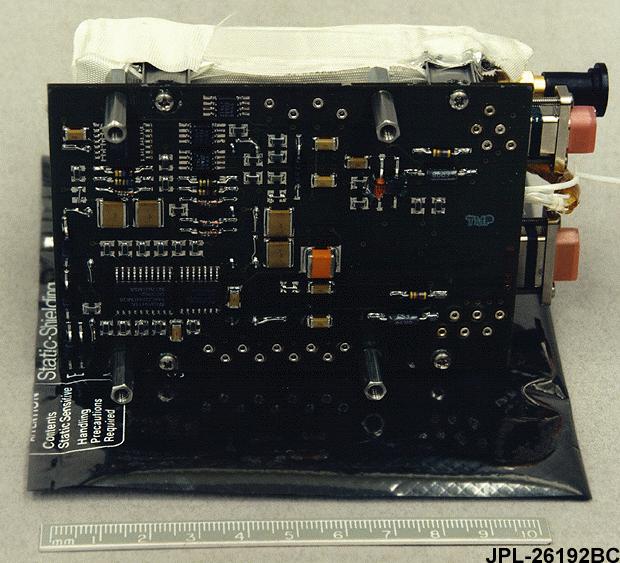
Opened up view of Rover Radio Modem
Specifications
LMRE Radio Hardware Images
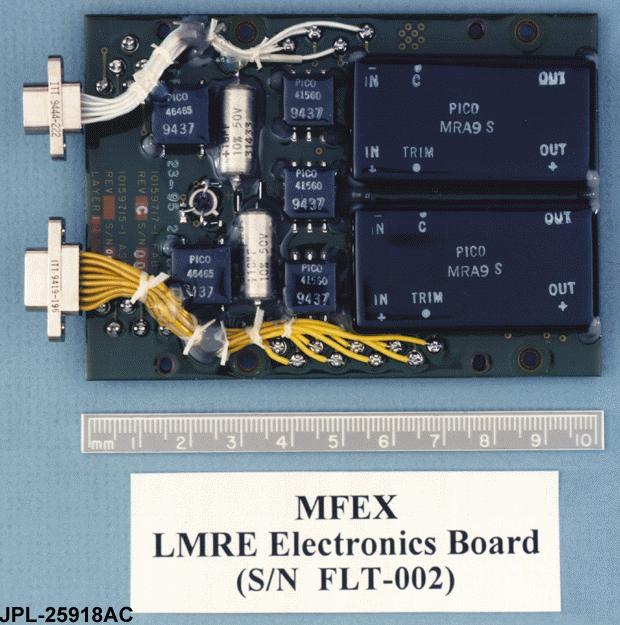
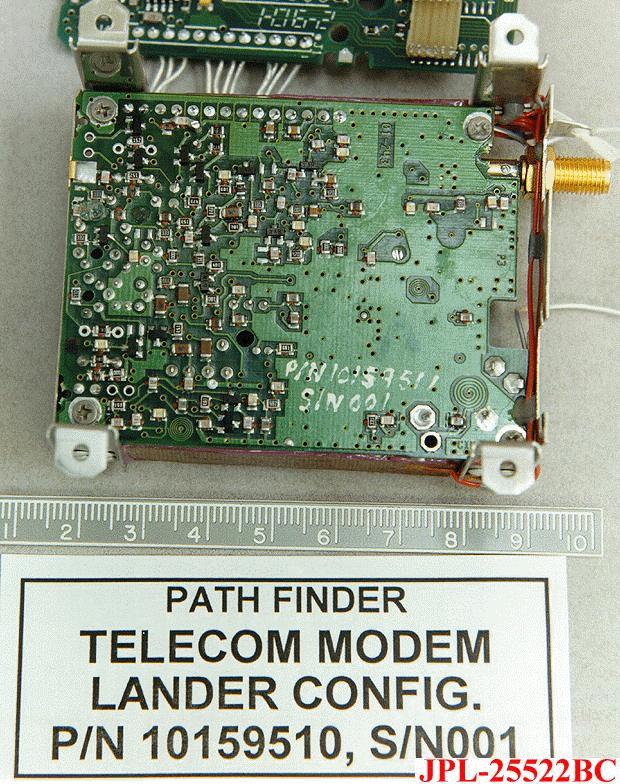
Completed LMRE Radios
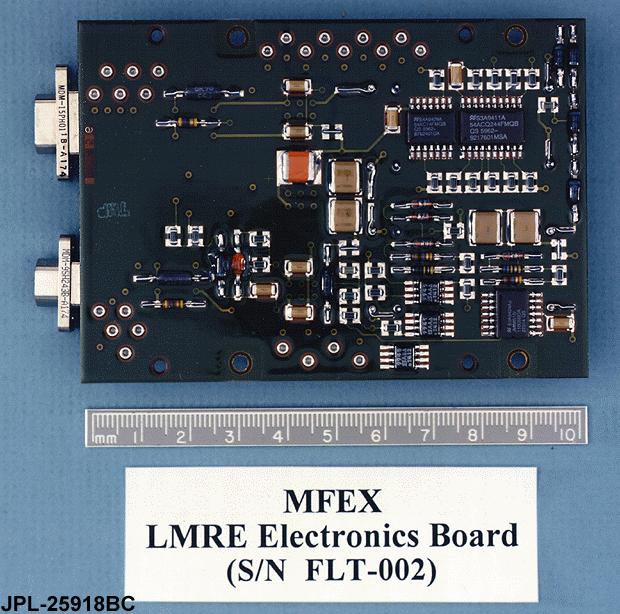
LMRE Radio Bottom View
LMRE Radio Modem Outside View
LMRE Radio DC Converter Board Top View
LMRE Radio DC Converter Board Bottom View
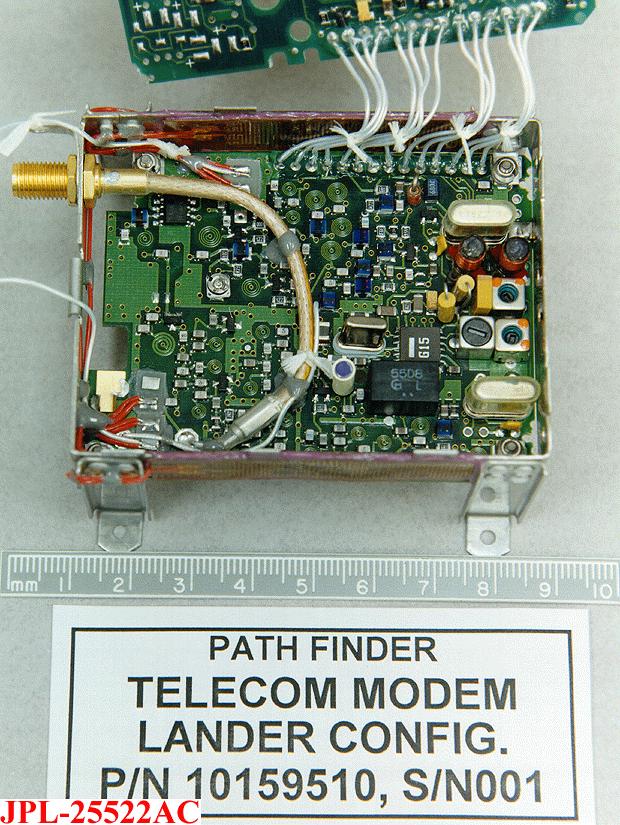
LMRE Radio RF Board Outside View
LMRE Radio RF Board Inside View
LMRE Radio Digital Board Inside View
LMRE Radio Digital Board Outside View
Rover Antenna Specifications
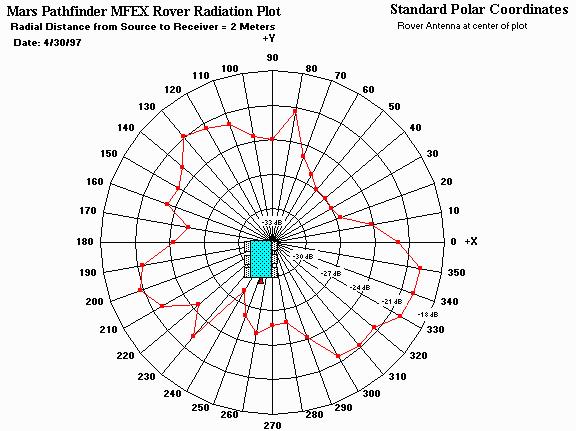
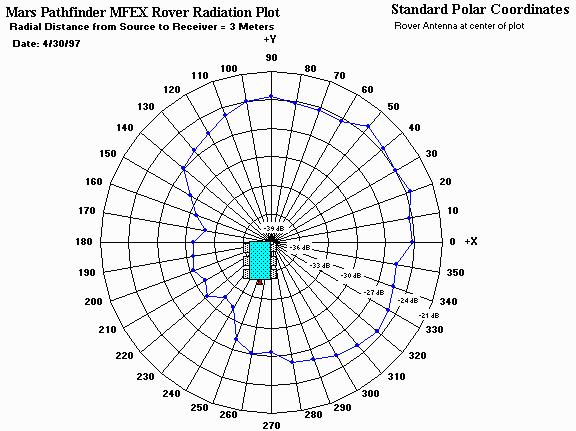
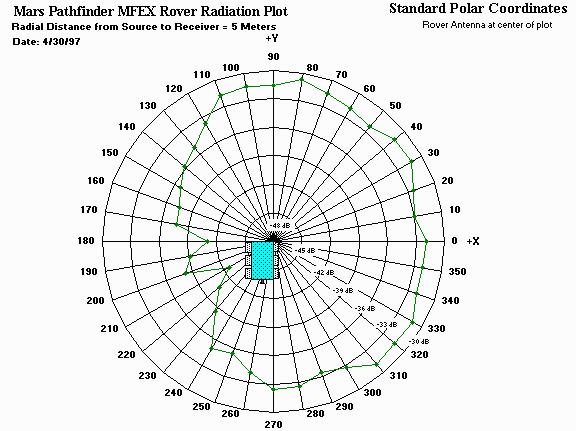
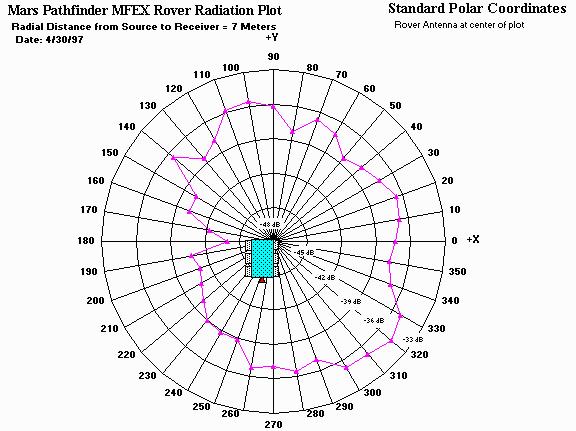
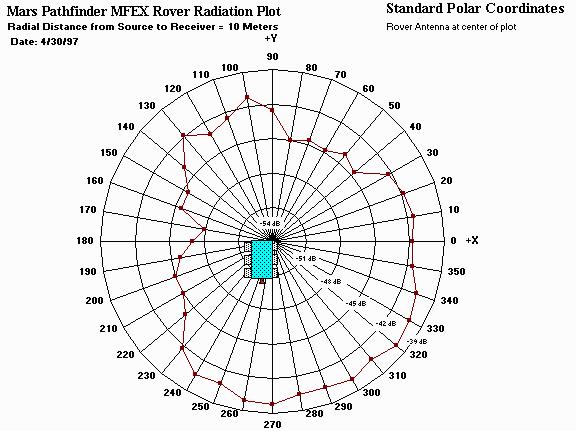
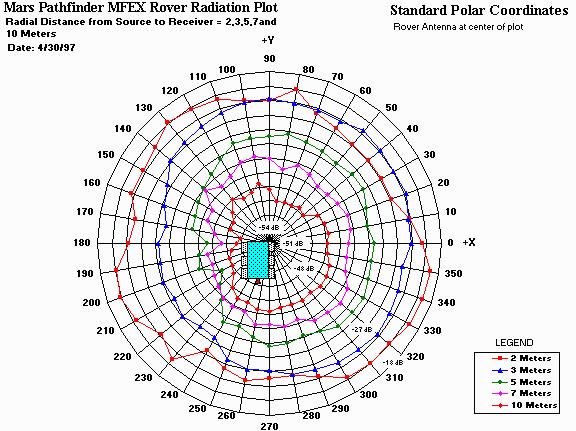
These antenna patterns were taken on the JPL Mesa antenna range using a static model rover. A flight-like rover antenna was mounted to the rover mast and placed a height of 83 cm from the ground. A radio modem operating in CW (Continuous Wave) mode was used to transmit a 459.7 MHz, 100 mW signal from the rover to a receiving antenna attached to a spectrum analyzer receiver. The receive antenna was a flight-like LMRE antenna mounted to the receiver at a height of 80 cm. You'll notice that the antenna pattern taken at a distance of 2 meters looks quite irregular. This is due to near-field distortion and scattering of the RF energy. Farther away, beyond 3 meters, the rover antenna is in the far-field and the true shape of the antenna's radiation pattern becomes more visible.
Rover Antenna Patterns
Rover Antenna Pattern at 2 Meters
Rover Antenna Pattern at 3 Meters
Rover Antenna Pattern at 5 Meters
Rover Antenna Pattern at 7 Meters
Rover Antenna Pattern at 10 Meters
Rover Antenna Patterns from 2-10 Meters
Rover Model Antenna Test Range Images
LMRE Antenna Specifications
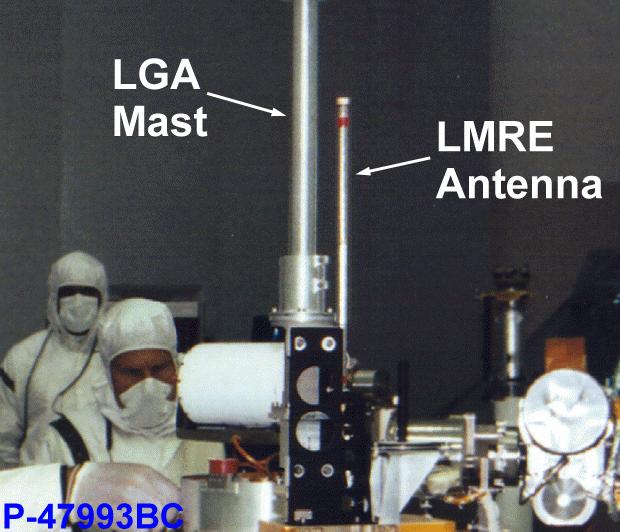
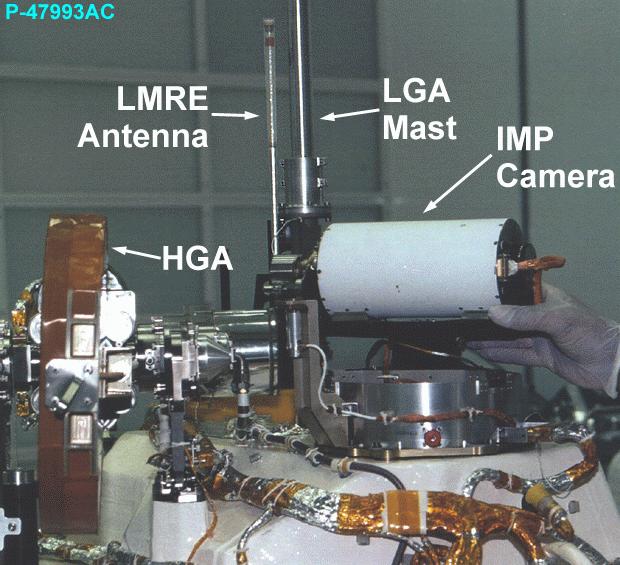
Flight LMRE Antenna on Lander at Kennedy Space Center SAEF-2 Facility
Flight LMRE Antenna at Kennedy Space Center SAEF-2 Facility
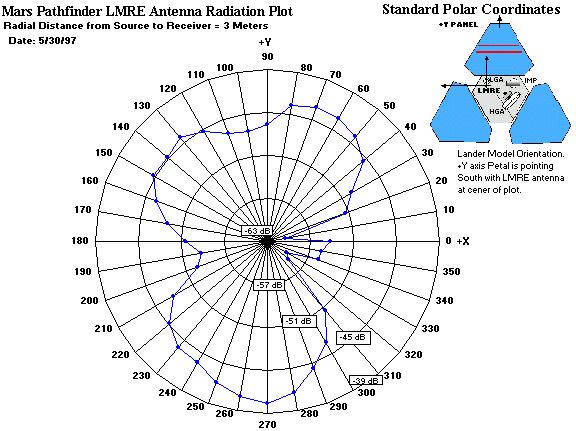
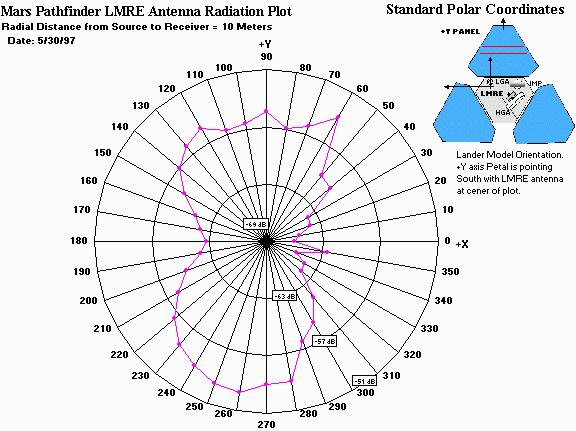
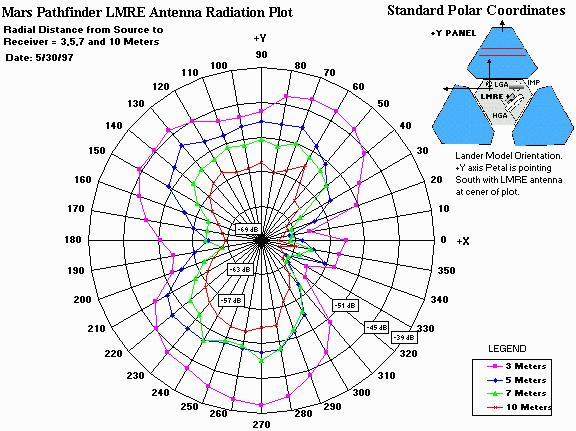
These antenna patterns were taken on the JPL Mesa antenna range using a static lander model. A flight-like LMRE antenna was mounted to the LGA (Low Gain Antenna) mast and placed a height of 83 cm from the ground. A radio modem operating in CW (Continuous Wave) mode was used to transmit a 459.7 MHz, 100 mW signal from the LMRE antenna to a receiving antenna attached to a spectrum analyzer receiver. The receive antenna was a flight-like rover antenna set to a height of 80 cm and connected to the receiver via a coaxial cable. You'll notice that the antenna pattern taken at a distance of 3 meters looks quite irregular. In particular, at 10° and 330° there are noticeable null zones. This is due primarily to scattering and out-of-phase reflections of the RF energy from the metallic components (e.g. Low Gain Antenna, High Gain Antenna, IMP mast, solar panels) of the lander structure. Farther away, beyond 5 meters, the LMRE antenna is away from this near-field scattering and the shape of the antenna's radiation pattern becomes better defined.
LMRE UHF Antenna Patterns
LMRE UHF Antenna Pattern at 3 Meters
LMRE UHF Antenna Pattern at 5 Meters
LMRE UHF Antenna Pattern at 7 Meters
LMRE UHF Antenna Pattern at 10 Meters
LMRE UHF Antenna Patterns from 3-10 Meters
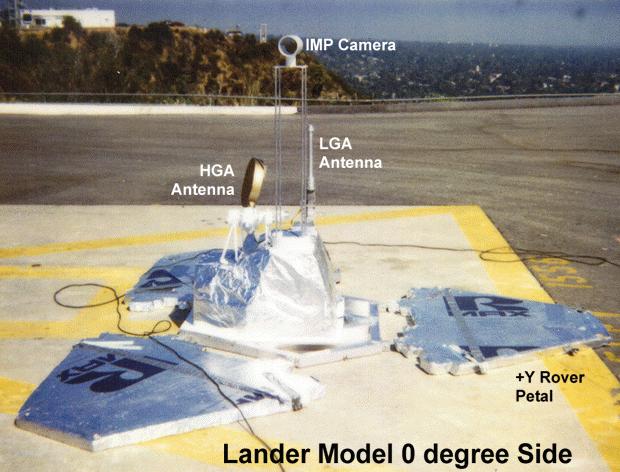
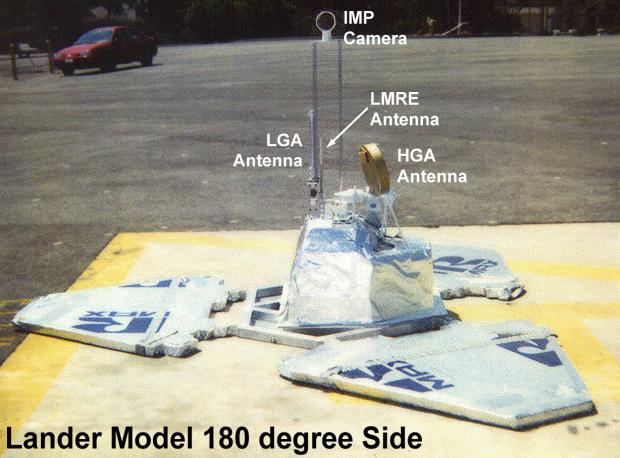
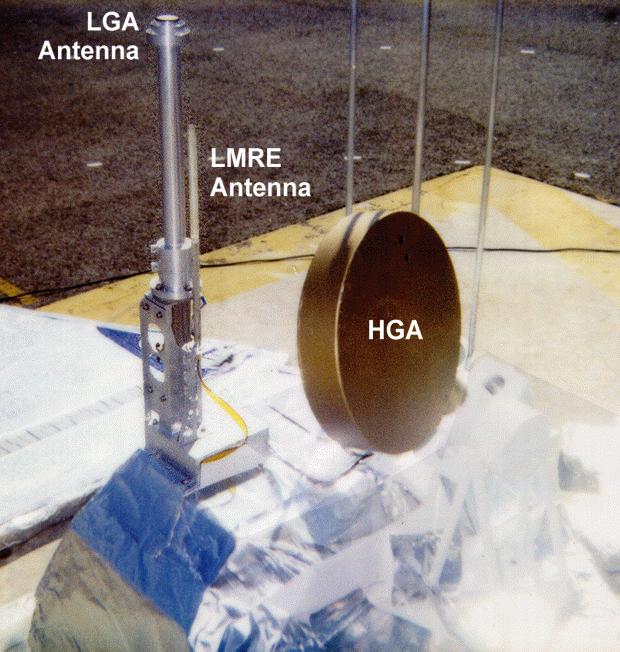
Lander Model Antenna Test Range Images
View of Lander Model from 0 degree angle
View of Lander Model from 180 degree angle
Close up of top of Lander Model
The performance of any radio frequency telecommunications system depends on numerous link parameters. These parameters include things like antennas, transmitters, modulation techniques, coding schemes, carrier performance, ranging performance, noise immunity, etc. All of these various parameters can improve the overall communication efficiency in their own way. When it comes to designing the entire communications system, communications engineers put all the components or subsystems together and determine the system's performance capability. Below we list some of the common link parameters that characterize telecommunications performance:
Transmitter parameters:
For the rover UHF telecommunications link analysis we found it was not necessary to consider all of the link parameters listed above, but only a subset. Here is a simplified representative Lander-to-Rover UHF Communications Link Analysis:
The results of this link analysis show the worst case condition and its outcome. Even at the worst case, a 10 meter distant link can still be maintained with a Bit Error Rate of <= 10-4. If we decide to traverse beyond 10 meters there is a very good probablility of having acceptable BER performance and maintaining a good lander-rover telecommunications link.
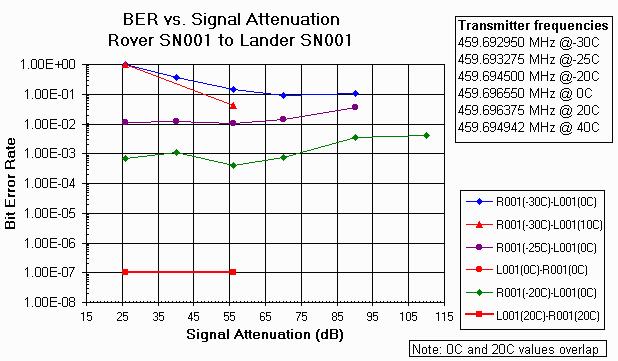
The following table lists the BER of the UHF link between the two flight radios under different temperature and signal attenuation conditions. Click HERE to see a plot of these BER data curves. The radio modems were tested with TTC-6000 BER Communications Analyzers, which transmitted a pseudo-random 65535 bit long pattern through one radio that was received by the other. To get a good sample, a total of 2.3 mega-bits of data was transferred during each 4 minute test. Two mega-bits was also chosen because that is about the size of a typical uncompressed rover image.
Bit Error Rate (BER) Measured Data
Modem |
Temperature |
Frequency |
Modem |
Temperature |
LO Frequency* |
Attenuation |
Bit Error Rate |
| LANDER SN001 | 20 | 459.697567 | ROVER SN001 | 20 | 414.696925 | 26 | 1.00E-07 |
| LANDER SN001 | 20 | 459.697567 | ROVER SN001 | 20 | 414.696925 | 56 | 1.00E-07 |
| LANDER SN001 | 0 | 459.697858 | ROVER SN001 | 0 | 414.698450 | 26 | 1.00E-07 |
| LANDER SN001 | 0 | 459.697858 | ROVER SN001 | 0 | 414.698450 | 56 | 1.00E-07 |
| LANDER SN001 | 0 | 459.697858 | ROVER SN001 | -30 | 414.696008 | 26 | 1.00E-07 |
| LANDER SN001 | 0 | 459.697858 | ROVER SN001 | -30 | 414.696008 | 56 | 1.00E-07 |
| LANDER SN001 | 10 | 459.697367 | ROVER SN001 | -30 | 414.696008 | 26 | 1.00E-07 |
| LANDER SN001 | 10 | 459.697367 | ROVER SN001 | -30 | 414.696008 | 56 | 1.00E-07 |
| LANDER SN001 | 30 | 459.696350 | ROVER SN001 | 40 | 414.694275 | 26 | 1.00E-07 |
| LANDER SN001 | 30 | 459.696350 | ROVER SN001 | 40 | 414.694275 | 56 | 1.00E-07 |
| ROVER SN001 | 20 | 459.696375 | LANDER SN001 | 20 | 414.697567 | 26 | 1.00E-07 |
| ROVER SN001 | 20 | 459.696375 | LANDER SN001 | 20 | 414.697567 | 56 | 1.00E-07 |
| ROVER SN001 | -30 | 459.692950 | LANDER SN001 | 0 | 414.699683 | 26 | 1.00E+0 |
| ROVER SN001 | -30 | 459.692950 | LANDER SN001 | 0 | 414.699683 | 40 | 3.53E-01 |
| ROVER SN001 | -30 | 459.692950 | LANDER SN001 | 0 | 414.699683 | 56 | 1.50E-01 |
| ROVER SN001 | -30 | 459.692950 | LANDER SN001 | 0 | 414.699683 | 70 | 9.07E-02 |
| ROVER SN001 | -30 | 459.692950 | LANDER SN001 | 0 | 414.699683 | 90 | 1.09E-01 |
| ROVER SN001 | -30 | 459.692950 | LANDER SN001 | 10 | 414.699050 | 26 | 1.00E+0 |
| ROVER SN001 | -30 | 459.692950 | LANDER SN001 | 10 | 414.699050 | 56 | 4.15E-02 |
| ROVER SN001 | -25 | 459.693275 | LANDER SN001 | 0 | 414.699683 | 26 | 1.16E-02 |
| ROVER SN001 | -25 | 459.693275 | LANDER SN001 | 0 | 414.699683 | 40 | 1.25E-02 |
| ROVER SN001 | -25 | 459.693275 | LANDER SN001 | 0 | 414.699683 | 56 | 1.02E-02 |
| ROVER SN001 | -25 | 459.693275 | LANDER SN001 | 0 | 414.699683 | 70 | 1.44E-02 |
| ROVER SN001 | -25 | 459.693275 | LANDER SN001 | 0 | 414.699683 | 90 | 3.62E-02 |
| ROVER SN001 | -20 | 459.694500 | LANDER SN001 | 0 | 414.699683 | 26 | 7.00E-04 |
| ROVER SN001 | -20 | 459.694500 | LANDER SN001 | 0 | 414.699683 | 40 | 1.08E-03 |
| ROVER SN001 | -20 | 459.694500 | LANDER SN001 | 0 | 414.699683 | 56 | 3.93E-04 |
| ROVER SN001 | -20 | 459.694500 | LANDER SN001 | 0 | 414.699683 | 70 | 7.69E-04 |
| ROVER SN001 | -20 | 459.694500 | LANDER SN001 | 0 | 414.699683 | 90 | 3.47E-03 |
| ROVER SN001 | -20 | 459.694500 | LANDER SN001 | 0 | 414.699683 | 110 | 3.97E-03 |
| ROVER SN001 | 0 | 459.696550 | LANDER SN001 | 0 | 414.699683 | 26 | 1.00E-07 |
| ROVER SN001 | 0 | 459.696550 | LANDER SN001 | 0 | 414.699683 | 56 | 1.00E-07 |
| ROVER SN001 | 40 | 459.694942 | LANDER SN001 | 30 | 414.696233 | 26 | 8.88E-05 |
| ROVER SN001 | 40 | 459.694942 | LANDER SN001 | 30 | 414.696233 | 56 | 1.00E-07 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}