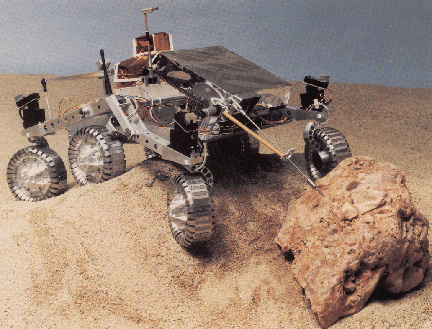
A Prototype Rover Design Showing the Rocker-Bogie Suspension
The JPL-developed Rocker-Bogie suspension system utilizes a six-wheel drive platform without axles or springs. The system kinematically adapts to terrain geometry and can negotiate obstacles twice the wheel diameter.
 Precise steering is
performed with steering actuators mounted above the four outer
wheels. The Rover can turn in place.
Precise steering is
performed with steering actuators mounted above the four outer
wheels. The Rover can turn in place.
To aid the Rover in exiting the Lander, ASTRO Aerospace is producing two self-deploying ramps. These ramps are restrained by cables which are cut by pyrotechnic devices. The ramps roll out like party favors onto the Martian surface.
Back to the Rover Home Page.