| |||||
|
| | |||||
|
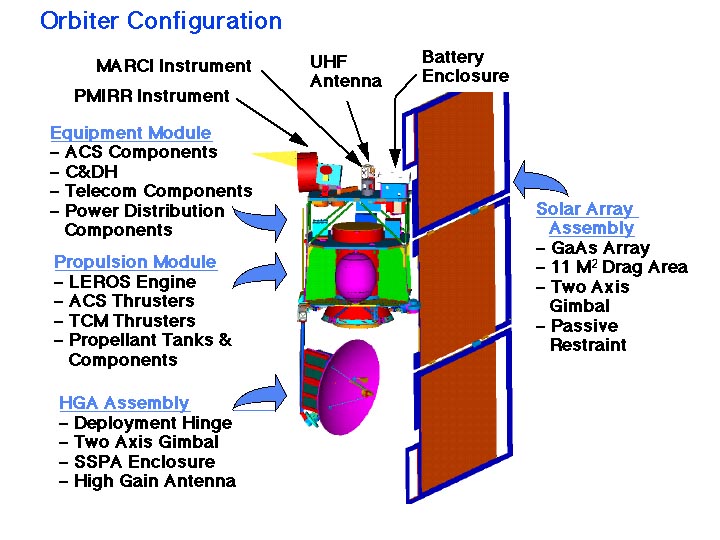
Mars Climate Orbiter
Flight System Description
Attitude Control
3-Axis Stabilized Four 5-lbf Trajectory Correction Manuever Thrusters, used also for Pitch & Yaw Four 0.2-lbf thrusters for Roll control Reaction Wheels Star camera + IMU, analog sun sensors backup The Orbiter is 3-axis stabilized in all mission phases following separation from the launch vehicle. The primary attitude determination is via star camera derived from the Clementine spacecraft star camera hand an inertial measurement unit, and is backed up by analog sun sensors. Reaction wheels provide primary attitude control during most mission phases, and are desaturated via RCS thrusters. Because of IMU lifetime concerns, the IMUs will be turned off during significant portions of Cruise and Mapping, and the vehicle operated in all-stellar mode. except during maneuvers. The RCS thrusters also provide attitude control during trajectory correction maneuvers (TCM's), Mars Orbit Insersion (MOI), aerobraking drag pass, Orbital Trim Maneuvers (OTM's), and safe mode In all, four 5-lbf thrusters are used for TCM's and pitch/yaw control. Four 0.2-lbf thrusters are used for roll control.
Command & Data Handling
RAD6000 Processor 128 MBytes Data Storage The RAD6000 32 bit processor developed for the Mars Pathfinder Project and embedded in the orbiter Command and Data Handling (C&DH) subsystem provides a central processing capability for all spacecraft subsystems including the payload elements. Electronic cards are provided to interface instruments and subsystems to the command and data handling (C&DH) subsystem. 128 Mbyte of data storage is provided on the processor card, although the spacecraft uses approximately 20% of this for its own internal programs. The rest of the space in the memory is used for science programs and data storage for sending back to Earth either from the lander and/or the orbiter.
Telecommunications
Cassini Deep Space Transponders 15 Watt Radio Frequency Solid State Amplifiers One 1.3 meter High Gain Antenna (Transmit/Receive)
One Medium Gain Antenna (Transmit Only)
One Low Gain Antenna (Receive Only) UHF 10 Watt Radio Frequeny System for 2-way communications with Lander Primary communication between the Earth and the orbiter is by use of the Deep Space Network (DSN) X-band (up/down) link and the orbiter’s deep space transponder developed for the Cassini spacecraft, a 15 Watt RF solid state amplifier, and a 1.3 meter (4.3 ft) diameter articulated (2-axis) high gain antenna. A two-way UHF link (i.e., commands from Earth passed through to the lander and receipt of data from the lander) is provided for on-orbit communication with the lander while it is on Mars.
Power
Single, 3 Panel GaAs/Ge Solar Array, 2 axis gimballed NiH2 CPV Batteries A 2 axis articulated, gallium arsenide solar array (7.4m^2 (80 ft^2) cell area) provides power and serves as the most significant drag brake during aerobraking passes (11m^2 (118 ft^2) total wing area). Nickel-hydrogen (NiH2) 16 amp-hour, common pressure vessel batteries provide power during eclipses and for peak power operations. The electrical power control electronics are derived primarily from the Small Spacecraft Technology Initiative (SSTI) spacecraft development.
Thermal Control
Passive: Louvers, MLI, Kapton, Paints, Dedicated Radiators Thermostatically Controlled and Computer Controlled Heater Circuits The thermal control subsystem uses passive methods and louvers to control the temperature of the batteries and the solid state power amplifiers. Passive coatings as well as multi-layer insulation blankets are used to control the temperatures. Where needed, radiators are used to take the excess heat out of the spacecraft components to keep them at their proper operating temperature.
Propulsion
Biprop System For Mars Orbit Insertion Only Hydrazine TCM Thrusters (4 5-lbf Thrusters) The propulsion subsystem is similar to the Mars Global Surveyor (MGS) spacecraft. The LEROS 640 N (144 lbf) main engine uses bipropellant mode (i.e., hydrazine fuel and nitrogen tetroxide oxidizer) for MOI, when a large thrust is required to slow the spacecraft down. Following MOI, the oxidizer is gone and the RCS 22.4N (5 lbf) and 0.9N (0.2 lbf) thrusters use the remaining monopropellant (i.e., hydrazine fuel) for all other propulsive maneuvers. This type of propellant system is termed "dual mode," since it works with bipropellant and monopropellant.
Structure
Composite Facesheets on Aluminum Honeycomb The orbiter structure is comprised of two modules: a gusset plate construction propulsion module scaled down from the Mars Global Surveyor design, and a truss construction equipment module. Both modules use aluminum honeycomb with composite face sheets.
Redundancy
Sofware Fault Protection Critial Items Cross-Strapped Most orbiter subsystem components are redundant with critical items cross-strapped. A software fault protection system is used to protect the spacecraft from reasonable, credible faults but also has resiliency built into it so many faults not thought of can be accommodated without taking the spacecraft down.
| Home | Mars Climate Orbiter | Mars Polar Lander | Deep Space 2 Microprobes |
| Welcome | Mailing List | Links | Credits |
For questions or comments on this website please refer to our list of contacts.