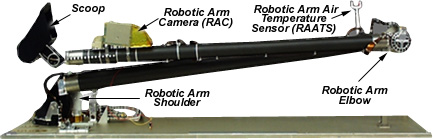
The Robotic Arm
The 2 meter long Robotic Arm (RA) will be used to dig trenches at the landing site to expose and collect materials found on or just below the Martian surface. After collecting sample material in the scoop, the RA will carry the soil to the TEGA where it will be analyzed for water and carbon dioxide. The Robotic Arm Camera (RAC), will obtain close-up images of the surfaces, walls, and floors of the trenches. Additionally, the RAC will image samples collected by the RA. The camera can determine if layering is present in the subsurface. This layering, which would have been produced by years of accumulation, may provide scientists with a geologic record of past events in the Martian climate.
RA was designed and built at the Jet Propulsion Laboratory (JPL) in Pasadena, California. The RAC was built by the German Max Planck Institute for Aeronomy (MPAe) and the University of Arizona Lunar and Planetary Laboratory under the direction of H. Uwe Keller (MPAe) and Peter Smith (UA).
|
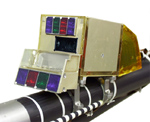
The Robotic Arm Camera (RAC)
The RA in the testbed at UCLA
The Scoop and Soil Temperature Probe (STP) |
Parts of the Robotic Arm and Their Function:
- Robotic Arm Camera
The Robotic Arm Camera (left)will take photographs of the soil at the tip of the scoop, examining its color and grain size, to help scientists understand the type of soil into which the RA is digging. Additionally, the RAC will image the walls of the trench in order to determine the presence of any fine-scale layering that may result from changes in Marian climate.
- Scoop
The scoop at the end of the Robotic Arm will dig trenches in the Martian soil. The Arm is about as strong as a human arm, and the scoop has additional teeth to aid in digging. Click Here to see a test of the scoop depositing a soil sample into the TEGA.
- Elbow Temperature Sensor
The Robotic Arm Atmospheric Temperature Sensor (RAATS) (above)is actually part of the MET package, but resides on the "elbow" of the Robotic Arm. This will allow scientists to read the temperature at any level, and acquire temperature measurements near the lander deck that have not been contaminated by waste heat from the lander.
- The Soil Temperature Probe (STP)
Also a part of the MET package, the Soil Temperature Probe (STP) (left)is located on the back of the Robotic Arm Scoop and will be pushed into the ground to measure the temperature of the Martian soil. This allows scientists to record the temperature of the soil just below the surface. When in the soil, the black and white markings indicate the depth at which it is taking measurements. Its measurements will be used to study temperature variations within the upper few cm of the Martian surface. The STP was built by Stephen Wood (formerly at UCLA, now at the University of Washington).
|









{kind=link}