Тема Вектор-УС «Исследования,
разработки и моделирование аппаратно-программных решений задачи высокоточных астроопределений, проводимых для управления ориентацией
космических объектов»
Гос.рег. № 01.20.0307396
Научный руководитель темы д.т.н. Г.А.
Аванесов
Разработка предложений и
натурное комплексирование в одном приборе звездного координатора и датчиков
угловой скорости.
Одним из путей уменьшения
массово-габаритных характеристик измерительного комплекса системы ориентации
космического аппарата является объединение прибора астроориентации и
гироскопических датчиков угловой скорости в одной конструкции. Интеграция
позволяет выполнять совместную обработку сырых измерений с разнотипных
чувствительных элементов, тем самым повышая помехозащищенность и
точность аппаратуры. Так, по астроизмерениям удается
обеспечить квазинепрерывную калибровку датчиков
угловой скорости, существенно повышающую точность оценивания их показаний.
Априорная информация, сформированная по показаниям датчиков угловой скорости,
позволяет повысить надежность и скорость распознавания звезд астроприбором
после засветки оптического канала Солнцем или при больших угловых ускорениях.
Кроме того, при использовании датчиков угловой скорости средней и высокой
точности удается обеспечить частоту обновления информации об ориентации до 10
Гц. На такой или меньшей частоте функционирует подавляющая часть систем
управления угловым движением, таким образом, информация, полученная с
интегрированного прибора, может быть использована непосредственно для
управления ориентацией КА.
Первым шагом в создании интегрированных
приборов ориентации в ИКИ РАН стало создание приборов БОКЗ-МФ, в состав которых
были включены низкоточные датчики угловой скорости,
выполненные по технологии МЭМС. Данные датчики, практически не повысив
габаритно-массовых и энергетических характеристик прибора, позволяют
автоматически восстанавливать работоспособность звездного прибора после
засветки или участка переориентации, сопровождаемого значительной угловой
скоростью КА.
В настоящий момент ведется разработка
нового поколения прибора БОКЗ-М30/500, в котором будут использованы МЭМС
датчики угловой скорости значительно более высокой точности по сравнению с
прибором БОКЗ-МФ. Эти датчики уже позволят прогнозировать положение звезд на
следующем кадре и реализовывать так называемый оконный режим работы звездного
прибора, при котором в обработку берется
не весь видеокадр, а только “окна” вокруг звезд. Использование этого режима
позволяет значительно ускорить распознавание звезд и повысить частоту обновления
информации об ориентации звездным прибором. Данный режим реализован в звездных
приборах ИКИ РАН и сегодня, однако положение звезд на следующем кадре
определяется на основе прогноза рассчитанного на основании двух предыдущих
кадров. Подобный прогноз хорошо работает при плавном движении КА и
рассчитывается с ошибкой при угловом ускорении, что, в свою очередь, приводит к
сбоям в измерениях звездного прибора. Использование датчиков угловой скорости
позволит определять положение окон при любом угловом ускорении, повышая тем
самым помехоустойчивость звездного прибора. Разработка прибора БОКЗ-М30/500
должна быть закончена в 2010 году.
Публикации по теме:
1. Бессонов Р.В., Дятлов С.А. Блок
формирований навигационных измерений. VI Конференция молодых ученых, посвященная Дню космонавтики.
Фундаментальные и прикладные космические исследования. Москва, ИКИ РАН, 9-10
апреля 2009
2. Куркина А.Н. Фильтрация измерений и
калибровка параметров датчиков угловой скорости. VI Конференция молодых ученых, посвященная
Дню космонавтики. Фундаментальные и прикладные космические исследования.
Москва, ИКИ РАН, 9-10 апреля 2009
3. Филиппова О.В. Энергетический расчет
бленды. VI
Конференция молодых ученых, посвященная Дню космонавтики. Фундаментальные и
прикладные космические исследования. Москва, ИКИ РАН, 9-10 апреля 2009
Разработка ПАО определения ориентации двумя звездными координаторами БОКЗ
Разработано программно-алгоримическое
обеспечение, позволяющее по информации с двух приборов построить систему
координат двух приборов и определить параметры ее инерциальной ориентации.
Результаты работы ПАО на борту КА представлены на рис.1. После исключения
низкочастотной составляющей, обусловленной угловым движением КА, получено
значение среднеквадратической ошибки по трем углам поворота на уровне 1.5 угл.сек (рис.2). Таким образом,
при одновременной работе двух звездных датчиков получено равноточное
определение ориентации по трем строительным осям.
Разработано программно алгоритмическое
обеспечение, интегрированное в КИА БОКЗ-М, позволяющее выполнять синхронные
измерения ориентации тремя приборами БОКЗ-М и определять параметры ориентации
системы координат, построенной на осях Z двух приборов. Обновление параметров
ориентации происходит 1 раз в 3 секунды. Точность параметров ориентации при
этом составляет 1.3, 1.4 и 1.6 угл.сек.
по осям Х, Y и
Z, соответственно.
Определены углы между осями Z
трех приборов (Z12, Z23, Z13).
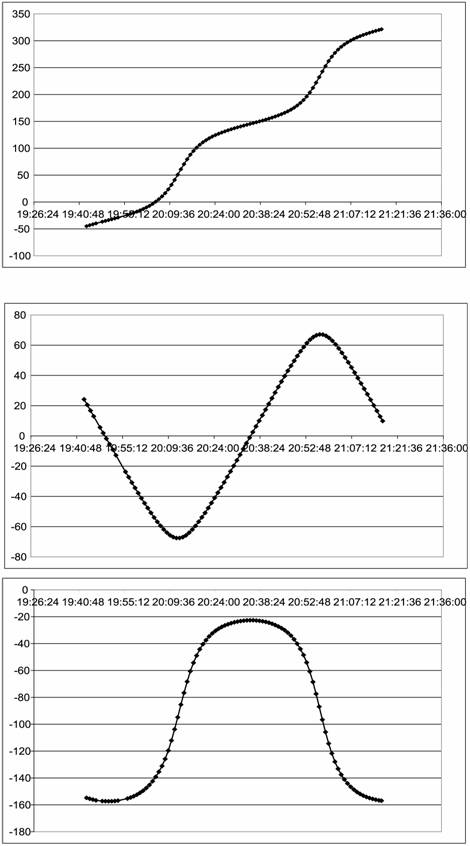
Рис.1 Изменение
углов равноточной ориентации (a, g и A) за виток
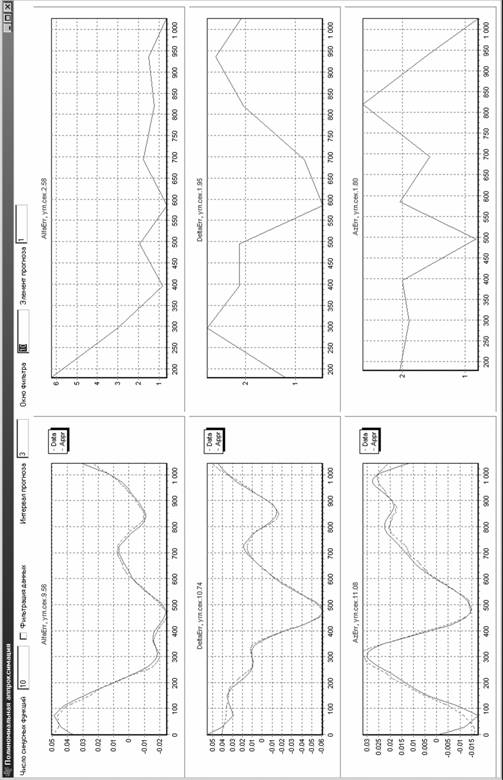
Рис.2.
Ошибки аппроксимации углов ориентации обобщенной системы
координат на пятиминутном интервале работы приборов. Оценка точности измерения углов ориентации обобщенной системы координат
Публикации
по теме:
- Г.А.
Аванесов, Е.В. Зарецкая, Я.Л. Зиман, М.И. Куделин, А.В. Никитин, А.А. Форш.
Оптический солнечный датчик. Особенности
конструкции прибора и испытательного оборудования. Таруса, 22-25 сентября
2008. Сборник трудов. ИКИ РАН, 2009
- Г.А.
Аванесов, Т.Ю. Дроздова, И.В. Катасонов, А.В.
Никитин. Алгоритм программного обеспечения оптического
солнечного датчика. Таруса, 22-25 сентября 2008. Сборник трудов.
ИКИ РАН, 2009
- Г.А.
Аванесов, В.А. Красиков, А.В. Никитин. Оценка точности прибора БОКЗ-М по
результатам наземных и летных испытаний. Таруса, 22-25 сентября 2008.
Сборник трудов. ИКИ РАН, 2009
- Г.А.
Аванесов, Т.Ю. Дроздова, А.В. Никитин. Результаты отработки оптических солнечных датчиков на стенде геометрической
калибровки и испытаний. Таруса, 22-25 сентября 2008. Сборник трудов. ИКИ
РАН, 2009
- Г.А.
Аванесов, Я.Л. Зиман, Е.В. Зарецкая, М.И. Куделин, А.В. Никитин, А.А. Форш
Оптический солнечный датчик. Особенности конструкции и испытательного
оборудования. Таруса, 22-25 сентября 2008. Сборник трудов. ИКИ РАН, 2009
- Т.Ю.
Дроздова, И.Ю. Катасонов, А.В. Никитин
Программно-алгоритмическое обеспечение оптического
солнечного датчика. Таруса, 22-25 сентября 2008. Сборник трудов.
ИКИ РАН, 2009
- Г.А.
Аванесов, В.А. Красиков, А.В. Никитин Оценка точности звездного прибора по
результатам наземных и летных испытаний. Таруса, 22-25 сентября 2008.
Сборник трудов. ИКИ РАН, 2009
- Т.Ю.
Дроздова, А.В. Никитин Методика и результаты отработки
программно-алгоритмического обеспечения оптических
солнечных датчиков. Таруса, 22-25 сентября 2008. Сборник трудов.
ИКИ РАН, 2009
- Г.А.
Аванесов, Т.В. Кондратьева, А.В. Никитин Исследование смещения энергетического
центра изображений звезд относительно геометрического центра на ПЗС
матрице и коррекция методической ошибки. Таруса, 22-25 сентября 2008.
Сборник трудов. ИКИ РАН, 2009
Тема ВСКИ “Исследование проблемы
прецизионного координатно-временного обеспечения (ККВО) видеоспектрометрических
космических исследований Земли и других небесных тел, реализуемого по данным
бортовых навигационных измерений. Разработка и моделирование
аппаратно-программных решений задачи КВО».
Гос.рег. № 0120.0 602989
Научный руководитель темы А.А. Форш
Разработка технических
предложений по координатно-временному обеспечению полетов ИСЗ и координатной
привязки проводимых с них съемок и измерений
Разработан стенд и программное
обеспечение, позволяющее определять матрицы перехода от внутренних систем
координат линеек МСУ к приборной системе координат МСУ.
С целью обеспечения координатной привязки
съемок и измерений, проводимых с КА, необходимо:
·
получать
информацию о координатах центра масс КА;
·
получать
информацию об угловом положении строительных осей КА;
·
синхронизировать
получение измерений с приборов и проводить съемку по секундным меткам.
В качестве источника информации о
координатах центра масс должна выступать система спутниковой навигации,
работающая по навигационным системам спутников ГЛОНАСС и/или GPS.
В качестве источника информации об
угловом положении строительных осей КА должен использоваться оптический
звездный датчик БОКЗ-М, определяющий матрицу (кватернион) перехода от
инерциальной системы координат к приборной системе координат (ПСК).
Запущен и проходит в настоящее время ЛКИ
комплекс многоспектральной спутниковой съемки на
борту КА «Метеор-М». Комплекс состоит из прибора спутниковой навигации, двух
многозональных сканеров МСУ-100 с фокусным расстоянием 100 мм, одного сканера
МСУ-50 с фокусным расстоянием 50 мм для съемки океана.
По данным БОКЗ-М, координатам центра
съемки, изображениям МСУ-100 и МСУ-50 с учетом матрицы установки приборов
относительно строительных осей КА, осуществлено трансформирование сканерных спектрозональных изображений в проекцию Меркатора
эллипсоида WGS-84 c
геометрической привязкой каждого элемента.
Разработано программное обеспечение,
позволяющее преобразовать данные системы спутниковой навигации и кватернионы
ориентации осей ПСК БОКЗ-М в геоцентрическую гринвичскую систему координат с
получением навигационных данных на каждую строку изображения.
Разработано программное обеспечение,
выполняющее трансформирование полученных изображений с приборов МСУ в проекцию,
определяемую узлами географической сетки.
Разработано программное обеспечение,
позволяющее выполнять полетную калибровку установочной матрицы прибора БОКЗ-М
относительно его строительных осей.
Полученное в итоге трансформированное
изображение представлено на рис.1
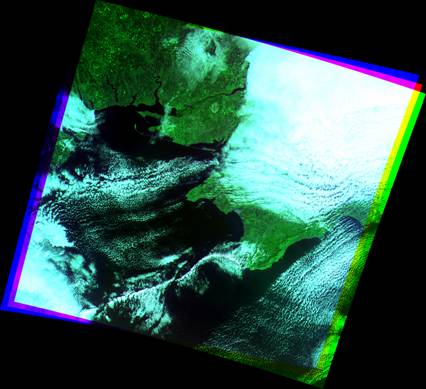
Рис.1
Трансформированное изображение в сетку географических координат эллипсоида WGS-84
Публикации по теме:
1.
Т.В.Кондратьева,
А.В. Никитин. Формирование модельных стереоизображений Фобоса
и их фотограмметрическая обработка в задачах припланетной
навигации. Всероссийская научно–техническая конференция «Современные проблемы
определения ориентации и навигации космических аппаратов». Таруса, 22-25
сентября 2008. Сборник трудов. ИКИ РАН, 2009.
2.
Б.С.
Жуков, Я.Л. Зиман, И.В. Полянский, С.Б. Жуков, О.В. Бекренев, Л.И. Пермитина.
Предварительная обработка видеоданных комплекса многозональной спутниковой
съемки. Всероссийская научно–техническая конференция «Современные проблемы
определения ориентации и навигации космических аппаратов». Таруса, 22-25
сентября 2008. Сборник трудов. ИКИ РАН, 2009
3.
А.В.Никитин.
Использование данных навигационных приборов с целью получения и координатной
привязки видеоданных дистанционного зондирования Земли высокого разрешения. Всероссийская
научно–техническая конференция «Современные проблемы определения ориентации и навигации
космических аппаратов». Таруса, 22-25 сентября 2008. Сборник трудов. ИКИ РАН,
2009
Разработка
ПАО бортовой обработки данных ТСНН для обеспечения спуска и посадки на Фобос.
Проведена доработка и тестирование
бортового программно-алгоритмического обеспечения (ПАО) узкоугольной
(УТК) и широкоугольной (ШТК) камер телевизионной системы навигации и наблюдения
(ТСНН) проекта «Фобос-Грунт». Разработанное ПАО
обеспечивает в режиме «Посадка» управление работой камер ТСНН и автономную
обработку получаемых ими изображений для оценки высоты и компонент скорости КА,
выбора оптимального места посадки и формирования репортажного кадра.
Проведенная доработка включает:
-
нормализацию
признаков распознавания опорных точек в моно- и стерео-режимах для учета неравномерности распределения
чувствительности камеры по полю кадра,
-
учет
фактической взаимной ориентации камер при проведении стереообработки
информации,
-
уточнение
методики прогнозирования областей поиска соответствия в моно- и стерео- режимах,
-
введение
сжатия репортажного кадра, позволяющее увеличить его размер при том же объеме
передаваемой информации,
-
уточнение
циклограммы работы камер.
Для тестирования алгоритмов обработки
данных ТСНН был доработан стенд моделирования изображений поверхности Фобоса с целью моделирования стереоизображений, которые
будут получены УТК и ШТК во всем требуемом для измерений диапазоне высот от 10
км до 10 м.
Дополнительно тестирование алгоритмов
проводилось по снимкам Луны высокого разрешения, полученным КА LRO.
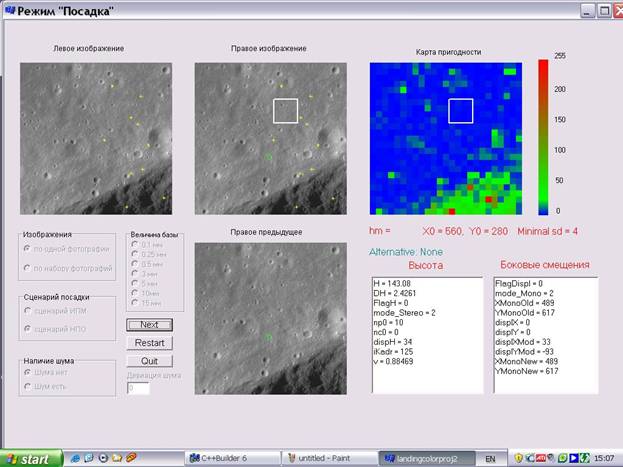
Приведенный рисунок иллюстрирует работу бортового ПАО по полученному LRO снимку Луны.
Интерфейс управляющей программы отладки
ПАО ТСНН в режиме «Посадка» отображает (слева направо и сверху вниз):
-
текущий
«левый» кадр стереопары с указанием положения выбранных опорных точек для стереоизмерения высоты;
-
текущий
«правый» кадр стереопары, с указанием: (а) положения опорных точек для стереоизмерения высоты, для которых установлено
соответствие с «левым» кадром, (б) положения опорной точки для определения
бокового смещения, для которой установлено соответствие с предыдущим «правым»
кадром, и (в) положения оптимальной площадки для посадки (белый квадрат);
-
карту
пригодности с указанием положения оптимальной площадки для посадки,
-
управляющие
элементы для выбора последовательности модельных изображений,
-
предыдущий
«правый» кадр (под текущим «правым» кадром) с указанием положения выбранной
опорной точки для определения бокового смещения,
-
окна
с результатами измерения высоты и бокового смещения.
Публикации
по теме:
1. Б.С.Жуков, С.Б.Жуков, В.А.Гришин,
Р.В.Гордеев. Бортовое программно-алгоритмическое обеспечение информационной
поддержки посадки на Фобос. Всероссийская
научно–техническая конференция «Современные проблемы определения ориентации и
навигации космических аппаратов». Таруса, 22-25 сентября 2008. Сборник трудов.
ИКИ РАН, 2009, 294-303.
2. Б.С. Жуков, Б.С. Дунаев, С.Б. Жуков.
Моделирование детальных изображений поверхности Фобоса
для отработки задач информационной поддержки посадки на Фобос.
Всероссийская научно–техническая конференция «Современные проблемы определения
ориентации и навигации космических аппаратов». Таруса, 22-25 сентября 2008.
Сборник трудов. ИКИ РАН, 2009, 304-313.
Разработка алгоритмов
обработки изображений для решения задач управления посадкой летательных
аппаратов.
1.
Дальнейший анализ точностных характеристик систем
технического зрения, как бинокулярных, так и монокулярных.
В рамках этого направления, в частности,
получены оценки точности измерения линейных и угловых координат монокулярной
системой технического зрения по результатам визирования стыковочного
(посадочного) маркера известной конфигурации. Пример простейшего маркера
приведен на рис. 1. Оценки точности измерения линейных и угловых координат
приведены на рис. 2. Эти оценки заданы как функции углов a и b. Угол a - угол
между нормалью к плоскости маркера и вектором, направленным на камеру. Угол b - угол разворота по азимуту вектора,
направленного на камеру.
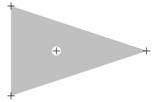
a) б)
Рис. 1. Изображение
маркера (а) и информативных точек изображения с пометкой ![]() (б).
(б).
Линейные
координаты Угловые
координаты
X g
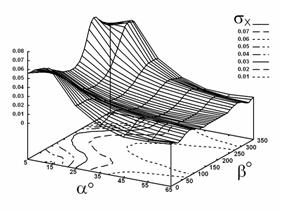
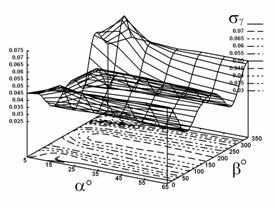
Y j
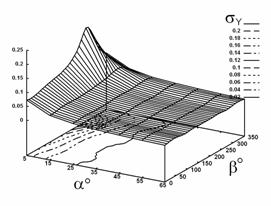
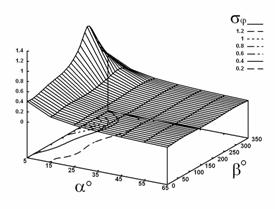
Z y
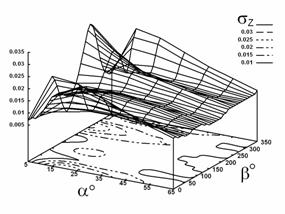
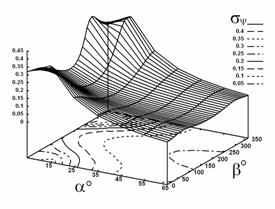
Рис. 2. Графики
ошибок измерения координат ТВ-камеры относительно плоского маркера (h=10 м).
2.
Анализ двухканальных алгоритмов установления соответствия изображений одних и тех
же точек поверхности на стереопарах и на последовательности монокулярных
изображений. Структуры
одноканального и двухканального алгоритма представлены на рис. 3 и 4.

Рис. 3. Структура одноканального
алгоритма установления соответствия.

Рис. 4. Структура двухканального
алгоритма установления соответствия.
В
результате проведенных работ было показано, что двухканальные алгоритмы способны
обеспечить при надлежащей оптимизации их параметров вероятность аномальных
ошибок установления соответствия достаточно близкую к этой вероятности для
одноканальных алгоритмов, при многократном сокращении вычислительных затрат.
3. Разработка быстрых
алгоритмов установления соответствия.
Развитие спектральных представлений образов окрестностей на вложенных носителях.
Были
проанализированы и реализованы следующие методы построения быстрых алгоритмов
установления соответствия:
а)
использование быстрых алгоритмов вычисления спектральных коэффициентов;
б)
использование “потоковых” методов вычисления спектров, сходных с методами
фильтрации скользящим окном;
в)
использование предварительного поиска и классификации особенностей;
г)
использование многоканальных методов установления соответствия на изображениях
разного разрешения.
Наиболее эффективным оказался двухканальный алгоритм с использованием предварительного поиска и классификации особенностей. Таким образом, было показано, что для указанного спектрального представления (на вложенных носителях) можно построить алгоритмы установления соответствия, отличающиеся высокой эффективностью.
4. Разработка принципов
построения перспективных полнофункциональных систем технического зрения,
способных обеспечивать решение всех задач управления полетом в реальном времени
в полностью автоматическом режиме.
В рамках данного направления проведен анализ существующих систем технического
зрения. Анализ показал, что существуют системы технического зрения, реализующие
функции высокоточной навигации, управления угловой ориентацией и стабилизацией
летательного аппарата, обеспечения полета в непосредственной близости к
различным объектам и поверхностям, управления посадкой, обнаружения и слежения
за заданными подвижными объектами, наведения на заданные объекты. Кроме того,
существуют системы обработки изображений, осуществляющие автоматическое
распознавание и классификацию большого круга объектов, присутствующих на
аэрофотоснимках и космических снимках высокого разрешения. Это
создает предпосылки создания в ближайшие 10-15 лет полнофункциональных систем
технического зрения, обеспечивающих информационную поддержку всех задач управления полетом
беспилотных летательных аппаратов.
Проработаны
некоторые направления по интеграции систем технического зрения с системами
управления, использующими методы автономного искусственного интеллекта.
5.
Работа по проекту “Фобос-грунт”. В рамках этого направления произведено
моделирование процесса посадки по имеющейся баллистической информации:
а) получены экспериментальные оценки
устойчивости процессов слежения за текущей высотой в стереорежиме,
а также за перемещением точек в поле зрения в монокулярном режиме;
оптимизированы параметры алгоритмов для повышения надежности процессов слежения
и прогноза;
б) проведен анализ ошибок измерения
дальности в зависимости от разбросов различных конструктивных
параметров ТСНН;
в) получены оценки влияния углового и
линейного положения камер на конфигурацию и положение областей поиска
особенностей; оптимизированы параметры алгоритмов для уменьшения влияния этих
факторов на работу алгоритмов установления соответствия;
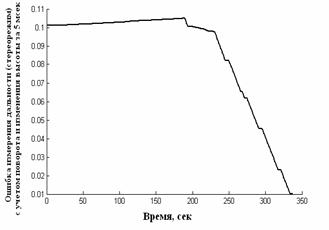
г) получены оценки влияния асинхронности
моментов съемки на погрешности измерения дальности (рис. 5).
|
|
|
Рис. 5. Оценка ошибки измерения высоты,
обусловленная асинхронностью моментов съемки камер стереопары. |