|
2.5. |
Фундаментальные
и прикладные научные исследования в области механики, систем управления и
информатики |
Тема
УПРАВЛЕНИЕ. Исследования
в области динамики сложных механических систем, проектирования орбит и
построения математических моделей планирования космических экспериментов.
Научный
руководитель д.т.н. Р.Р. Назиров
1. Цикл работ по исследованию динамики колец, состоящих из
холодной, разреженной плазмы с высокой электронной концентрацией, вращающихся в
магнито-гравитационном поле центрального тела.
Рассмотрена проблема динамики колец,
состоящих из холодной, разреженной плазмы с высокой электронной концентрацией,
вращающихся в Магнито-гравитационном поле центрального тела. Краевая задача
магнитной гидродинамики, сформулированная на предыдущем этапе, сведена к
конечно-мерной математической модели, имеющей форму системы уравнений в
конечных разностях.
Наряду
с численным получены приближенные аналитические решения, описывающие
магнито-гравитационные и магнито-гироскопические волны. Обнаружено множество
элитных колец, удовлетворяющих кванто-механическому условию де Бройля,
переходящих в процессе эволюции в наблюдаемые кольца больших планет.
Проведено
сравнение областей существования элитных колец в околопланетном пространстве и
плазменных торов с результатами современных наблюдений. Обнаружено
существование среди элитных колец некоторых суперэлитных, порождающих в
процессе эволюции планеты и их спутники. Доказан изоморфизм эволюционно зрелых
суперэлитных колец и Боровских орбит электрона в атоме водорода.
-
По результатам
работы сделано 2 доклада на семинаре в ИКИ,
доклад на семинаре в ИПМ им. М.В. Келдыша, выпущен препринт:
-
Б.И.
Рабинович. «Суперэлитные плазменные кольца и орбиты планет и спутников,
изоморфные орбитам электронов в водородоподобных атомах». Препринт ИКИ Пр–2023,
2005
-
Приняты к
публикации в журнале «Космические исследования» 3 статьи.
2.
Исследования по динамике полета и управлению космическими аппаратами с
солнечным парусом с изменяемой отражательной способностью.
Результаты оформлены в виде доклада на конференцию по малым аппаратам для межпланетных исследований. Проведенные исследования позволили построить методику управления солнечным парусом путем изменения его отражательных характеристик и ориентации, позволяющую изменять амплитуды орбит в окрестности точек либрации. Рассматривались возможности построения группировок космических аппаратов около точек либрации. Проанализированы случаи построения таких орбит около точек либрации в системе Солнце-Меркурий.
-
Подготовлена
публикация и сделан доклад на 5-м Международном Симпозиуме по малым аппаратам для наблюдения Земли,
проведенном в апреле 2005 года в Берлине:
-
Novicov,D.,Nazirov,R., Eismont,N. «Spacecraft
formation control in vicinity of libration points using solar sails». Published
in Small Satellites for Selected Proceedings of 5th International Symposium of
International Academy of Astronautics, Berlin, April 4-8, 2005, edited by
Hans-Peter Roeser, Rainer Sandau, Arnoldo Valenzuela, Waltr de Gruyter, Berlin,
New York, pp. 304-312.
3. Разработка
методов управления ориентацией малых космических аппаратов с минимальным
составом измерительных и исполнительных элементов.
Разработано
математическое обеспечение для моделирования процессов управления космическим
аппаратом с применением моментов, создаваемых магнитными катушками. Сделаны
оценки характеристик таких систем управления для случаев стабилизации аппаратов
вращением. Подготовлены варианты сценариев управления для комбинированных
исполнительных элементов систем управления ориентацией.
-
в.н.с., к.т.н.
Эйсмонт Н.А., Тел.
333-10-78, E-mail: neismont@iki.rssi.ru
4. Разработка
методов управления относительным движением малых космических аппаратов.
Проведен
анализ возможностей использования систем массовой мобильной связи для
управления спутниками Земли, включая решение задач построения и поддержания их
относительного положения. Показано, что использование существующей сети
мобильной связи позволяет решать задачи управления спутниками Земли и получать
телеметрическую информацию практически непрерывно на протяжении всего полета,
при этом затраты на адаптацию наземных станций не требуются вообще, а бортовые системы удешевляются радикально.
-
Результаты
работы изложены в докладах на 6-й Международном Симпозиуме по снижению стоимости наземных систем и
операций космических аппаратов, состоявшийся в июне 2005 года в Дармштадте, в
Германии:
-
R.Nazirov «Ground Facilities for Space Operations in
Russia».
-
R.Nazirov, N.Eismont, D.Novikov «Spacecraft Control System with Public Access
Based on Mobile PhoneTechnology»
5.
Исследование условно-периодического и периодического движения в ограниченной
двукратно осредненной задаче 3-х тел.
Изучен спектр либрационной и
ротационной составляющих долготы восходящего узла и аргумента перигея орбиты
ИСЗ в прцессе эволюции, связанной с несферичностью геоида и гравитационными
возмущениями со стороны внешних тел (Луна, Солнце).
Проведена
классификация орбит ИСЗ по характерным параметрам, позволяющая выделить область
совместного влияния перечисленных факторов и область преимущественного влияния
несферичности геоида. Показано, что основным параметром, разделяющим эти
области является большая полуось орбиты, отнесенная к радиусу Земли.
Введение
двух малых безразмерных параметров позволило исследовать соответствующую
асимптотику.
-
По результатам
работы сделан доклад на семинаре в ИКИ и подготовлен к публикации препринт.
-
с.н.с. к.ф.-м.н. В. И. Прохоренко,
Тел. 333-50-45, vprokhor@iki.rssi.ru
6.
Качественное исследование влияния прецессии орбиты Луны как возмущающего
фактора в двукратно осредненной ограниченной задаче 3-х тел.
Проведен параметрический анализ решения
двукратно осредненного ограниченной проблемы трех тел и исследовано влияние на
него прецессии плоскости орбиты Луны.
Интегральные константы, входящие в
интегралы, полученные М.Л. Лидовым, превращаются, как выяснилось, под влиянием
нового возмущающего фактора в некоторые
функции времени, подобные оскулирующим элементам. Аналитические исследования и
численное интегрирование позволили установить существенное влияние долготы
восходящего узла орбиты ИСЗ при учете возмущения, связанного с прецессией
плоскости орбиты Луны, на время существования ИСЗ. Показаны примеры, такого
удачного выбора начального значения этого параметра, который позволяюет
увеличить это время на порядок.
Были
обнаружены также некоторые новые свойства невозмущенного и возмущенного решения
М.Л. Лидова, в частности объяснить определенную симметрию либрационного и
ротационного режимов эволюции и возможность получения квадратурных формул для
соответствующих периодов непосредственно с помощью интегралов М.Л. Лидова, без
привлечения дополнительных дифференциальных уравнений. Эти результаты были
получены на основе обнаруженной точной гидродинамической аналогии (модель
стратифицированной жидкости).
Для
случая, когда учитывается дополнительное возмущение, связанное с прецессией
плоскости орбиты Луны, удалось получить приближенную гидродинамическую аналогию
(модель однородной жидкости).
-
Б.И.
Рабинович, В.И. Прохоренко. «О гидродинамической аналогии решения двукратно
осредненной проблемы Хилла». Космические исследования. Т. 43. № 3, 2005
-
Б.И.
Рабинович, В.И. Прохоренко. «О гидродинамической аналогии решения двукратно
осредненной проблемы Хилла, возмущенной прецессией орбиты возмущающего тела».
Космические исследования. Т. 43. № 5, 2005
7. Построение
математических моделей систем и разработка алгоритмов управления разрывными
системами при случайных возмущениях.
Исследованы возможности
управляемой стабилизации систем с разрывными характеристиками, включая системы
с ударным взаимодействием. Движение считается устойчивым, пока траектория
системы на фазовой плоскости остается внутри допустимой области, ограниченной
сепаратрисой. При пересечении сепаратрисы траектория выходит из области
притяжения устойчивого положения равновесия в
область неустойчивости.
Для оценки
предельных возможностей управления при случайных воздействиях использовался стохастический критерий
Мельникова. Этот критерий показывает, что эффективным будет управление по
скорости, и устанавливает оценку снизу: если уровень управления ниже
установленного, то система неустойчива. Показано, что вид управляющей функции
не зависит от формы спектра и интенсивности случайного возмущения, но
предельные возможности управления зависят от этих параметров.
Второй
критерий, определяющий жизнеспособность системы – среднее время и вероятность
пребывания в заданной области. Получены явные оценки и установлено
сравнительное влияние параметров системы и возмущения на среднее время
достижения границы области.
Как пример,
рассмотрена задача управляемой стабилизации конструкции. Движение вызвано
интенсивным начальным импульсом с последующим случайным фоном. Такое внешнее
возмущение типично при запуске космических аппаратов, и т.д. Построена
допустимая область движения, получена оценка предельных возможностей
управления, препятствующего падению конструкции.
-
«Асимптотическая
оценка вероятности и среднего времени пребывания точки в круговой области».
ДАН, 2005, т. 401, № 2, с. 177-180 (совместно с Л.Д. Акуленко).
-
«Control of random rocking dynamics of block-like
structures». Proceedings of the 3rd European Conference on Structural Control,
Vienna, Austria, July 2004. TU Wien. 2005. Pp. M6-29 - M6-32.
-
«Random rocking dynamics of a flexible structure».
Safety and Reliability of Engineering Systems and Structures, G. Augusti, G.I.
Schuller, and M. Ciampoli, Eds. Millpress, Rotterdam. 2005. Pp. 885-890.
-
в.н.с., д.ф.-м.н. А.
С. Ковалева, a.kovaleva@ru.net
8.
Исследования движения, управляемого уравнениями Лагранжа, при слабом шуме.
Проведены
исследования движения. Получена асимптотическая оценка времени выхода из
допустимой области для многомерных систем. В качестве примера было проведено
оценивание времени жизни звезды в гравитационном поле галактики.
-
Workshop on Stochastic Analysis, Юваскюла, Финляндия, 18 - 21 Мая 2005. Доклад: Large deviations estimates of escape time for
Lagrangian systems with small noise.
-
5th EuroMech Nonlinear Dynamics Conference. Эйндховен, Нидерланды. 7-12 Aвгуста 2005. Доклад: Logarithmic estimation of escape time for a
Lagrangian system with small noise effects.
-
44th
Control and Decision Conference, Севилья, Испания, 11 - 15 Декабря 2005.Доклад: Large deviations estimates of escape time for Lagrangian
systems. Семинар по управлению в механических системах, Ин-т проблем
механики РАН, декабрь 2005. Доклад:
Асимптотическая оценка первого момента
выхода из области для слабо возмущенных
Лагранжевых системы (совм. с Л.Д. Акуленко).
-
«Logarithmic estimation of escape time for a Lagrangian
system with small noise effects». Proceedings of the 5th EuroMech Nonlinear
Dynamics Conference. Eindhoven, The Netherlands. 7-12 August, 2005. Eindhoven
University of Technology, 2005. Pp. 749-754.
-
в.н.с., д.ф.-м.н. А. С. Ковалева, a.kovaleva@ru.net
9.
Разработка варианта схемы построения межпланетной космической станции и
баллистического обеспечения управлением движением.
Исследована схема, состоящая из трех
блоков, два из которых движутся по орбитам около Земли и планеты, а третий блок
выполняет межпланетный перелет.
В процессе выполнения работы исследовалась принципиальная возможность создания транспортной трассы Земля-Луна на
основе использования тросовых систем. Полученные результаты показывают, что на
основе современных технических средств возможна реализация подобного проекта. В процессе создания и эксплуатации
предлагаемой космической системы могут быть реализованы ряд комплексных задач.
Если будет построена достаточно развитая транспортная трасса на основе тросовых систем, то возможно
поставить вопрос о строительстве космической станции, предназначенной для
выполнения циклических круизных перелетов по маршруту от окрестности Земли до
окрестности Луны и обратно.
Группировка, в состав которой
включена космическая станция, находясь в
поле тяготения двух тел, сохраняет неизменным гравитационный потенциал,
и поэтому для выполнения полета не требуется применения ракетных двигателей.
Схема
полета космической станции, показана на рисунке.
|
|
В момент времени, когда тросовая
система при движении по орбите OK находится вблизи перигея в точке Е1, от
концевого блока А2 отделяется космическая станция KC. После отделения от
тросовой системы космическая станция получает приращение скорости и
выходит на траекторию Op полета к
Луне. В свою очередь, после отделения тросовая система теряет скорость, и
апогей ее орбиты OM уменьшается
по сравнению с апогеем исходной орбиты OK. Далее происходит стыковка станции КС с концевым блоком
пращи Ts на орбите Os около Луны. После стыковки станция
переходит на эллиптическую орбиту Oс
около
Луны. |
Далее выполняется несколько витков
около Луны, затем КС отделяется. При этом тросовая система TS возвращается на исходную орбиту OS. КС совершает перелет к Земле и вблизи перигея орбиты OM стыкуется с тросовой системой. На этом
цикл заканчивается. Продолжительность перелета в одну сторону около трёх
суток. Показана, возможность выбора
траекторий перелета, которые позволяют осуществлять циклические перелеты по
трассе Земля-Луна.
-
д.т.н. Сидоров
И.М., Тел. 333-14-89
10.
Разработка алгоритма управления стыковкой космического аппарата с концевым
блоком тросовой системы , находящимся под действием центробежной силы.
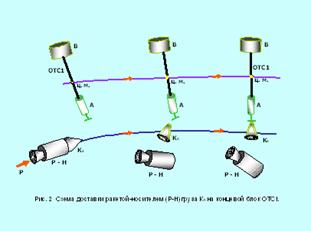
Исследовалась задача построения
управления процессом сближения и контакта, отделившегося от ракеты носителя
транспортного блока, с концевым блоком тросовой системы. Тросовая система
находится в режиме вращения как праща , а ее центр движется по круговой орбите
вблизи Земли. Предполагается, что после отделения от ракеты носителя транспортный блок находится на расстоянии
примерно 100км от концевого блока пращи. Скорость транспортного блока после
отделения на50-100м/с меньше чем ожидаемая скорость концевого блока.
Дополнительную скорость транспортный блок приобретает за счет работы
собственных ракетных двигателей. Это обеспечивает достаточно большой резерв
управляемости по углам тангажа и рыскания.
Сразу после отделения предполагается, что лазерный и оптический датчики,
установленные на транспортном блоке, определяют в системе координат, связанной
с объектом, углы вектора направленного на концевой блок и текущее расстояние до
него.
Далее последовательно применяется
процедура алгоритма с “моделью” и схема решения краевой задачи. В результате в
каждый момент времени определяются команды на включение и выключение импульсных
ракетных двигателей коррекции, установленных на транспортном блоке.
Результаты математического моделирования процесса сближения и контакта
показывают, что при значительных отклонениях от номинала параметров движения
объекта в момент отделения, а также при неточности работы исполнительных
органов контакт происходит в заданный момент времени с ошибкой по координатам в
пределах 1-2см и по скоростям в 5-10см/с.
|
|
На рисунке показана схема сближения и стыковки транспортного
блока KA, который выводится ракетой носителем с концевым блоком A пращи. |
-
Иванов, И.М.
Сидоров, Е.В. Емельянова “Исследование динамики управления орбитальной тросовой
системы при ее развертывании.”
-
Описание
принципа построения транспортной трассы на трассе Земля-Луна
-
приведено в
статье И.М. Сидоров, В.А. Фролов “О возможности реализации межпланетных
перелётов на основе использования
гравитационных сил в окрестности планет”, которая направлена в журнал “ Земля-
Вселенная “.
11.
Разработка метода оптимизации перелетов с малой тягой в задаче трех тел на
основе модифицированного метода транспортирующей траектории
Проведены исследования по возможности
модификации метода транспортирующей траектории (МТТ) с целью его применения для оптимизации
перелетов с малой тягой в задаче трех тел.
На основе результатов этих исследований разработана следующая процедура
применения модифицированного МТТ к оптимизации полетов с малой тягой к
коллинеарным точкам либрации L1 и L2,
выведения на гало-орбиты вокруг этих точек, а также перелетов между
точками либрации:
1) Задаются несколько типов исходных
орбит, наиболее типичных для полетов к точкам либрации. Эти орбиты приведены в
таблице
|
Класс
перелета |
Число полных оборотов |
Тип орбиты |
||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
||
|
EE |
0 |
|
|
– |
– |
– |
– |
– |
– |
– |
|
EL |
0 |
|
|
|
|
– |
– |
– |
– |
– |
|
LE |
0 |
|
|
|
|
– |
– |
– |
– |
– |
|
LL |
0 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|





































2) Исходные орбиты используются для
нахождения орбит перелета без активных маневров между двумя заданными точками
пространства за заданное время. С этой целью разработана пошаговая процедура
трансформации исходной орбиты в орбиту перелета между двумя заданными точками.
В качестве примера на рис. 1 жирной линией изображена в трех проекциях такая
орбита перелета между двумя заданными точками на гало-орбитах вокруг точек
либрации L1 и L2; тонкой линией показана исходная
орбита.
3) Найденная таким образом орбита
перелета между двумя заданными точками за заданное время используется в
качестве опорной орбиты в МТТ: оптимальный перелет с малой тягой находится
путем линеаризации движения возле опорной орбиты аналогично тому, как это
делается в задаче двух тел.
|
|
На
рисунке приведена схема построения опорной орбиты для метода транспортирующей
траектории на примере перелета между двумя гало-орбитами. |
-
с.н.с., к.ф.-м.н. А. А. Суханов, sukhanov@iki.rssi.ru
12.
Исследования по численному решению задач оценивания и управления в условиях
неопределенности.
Ряд задач оценивания и управления
системой сводятся к обычным и многопараметрическим (так называемым обобщенным)
задачам линейного программирования при
решении которых могут возникнуть вычислительные проблемы. Перечислим некоторые
из таких задач, от успешного решения которых часто зависит будущее проектов
исследования космоса.
1) Минимаксная
задача оценивания.
2) Оптимальная
задача линейной идеальной коррекции.
3) Оптимальные
задачи планирования эксперимента.
Такие задачи
сводятся к упомянутым задачам линейного
программирования, при решении которых стандартным симплекс-методом часто
возникают вычислительные трудности. Они
связаны с одной из двух особенностей при решении: текущее базисное
решение может содержать малые компоненты; текущая базисная матрица является
плохо обусловленной и стремится к вырожденной при применении стандартного
симплекс-метода. Решение задач указанного класса обычно сопровождается большим
числом почти вырожденных итераций и накапливающимися большими вычислительными
ошибками.
Предлагается
эффективный метод решения задач указанного класса, сводящийся к решению
специально построенной задачи линейного
программирования с дополнительной переменной. Эта задача является строго
вырожденной с немалыми
положительными базисными переменными и
из любого ее базисного решения легко получить базисное решение основной задачи.
Показано, что применение для решения расширенной задачи разработанных для вырожденного случая алгоритмов либо
приводит к существенному уменьшению целевой функции, либо, если это уменьшение
мало, позволяет оценить близость к оптимальному решению.
Алгоритм
иллюстрируется на простых примерах, возникающих при решении одноимпульсной
линейной идеальной коррекции траектории.
-
Б.Ц.Бахшиян,
К.С.Федяев “Об эффективном решении почти вырожденных и плохо обусловленных задач линейного программирования, возникающих при управлении системой ”
Изв.РАН. Tеория систем и
управления. 2005. №6.
13. Решение задач оптимального управления
раскруткой-торможением твердого тела и задачи синтеза управления для класса линейных дискретных систем с ограничениями.
Изучается задача оптимального управления величиной и
направлением скорости вращения осесимметричного твердого тела. В качестве управления
используется главный момент внешних сил, приложенных к телу. Основной задачей
управления считается изменение вектора угловой скорости от начального значения
до требуемого терминального за фиксированное конечное время таким образом,
чтобы маневру соответствовали наименьшие энергозатраты. Граничные условия для
вектора угловой скорости могут быть произвольными, а изменение ориентации во
внимание не принимается. Другими словами, изучается задача управления
раскруткой-торможением твердого тела. В качестве критерия выбран
интегрально-квадратичный функционал, характеризующий энергозатраты для
осуществления маневра. Для решения задачи использовались необходимые условия
принципа максимума. Для получаемой канонической системы прямых и сопряженных
дифференциальных уравнений установлены новые нетривиальные первые интегралы,
которые позволили параметризовать множество всех экстремалей. Поэтому задачу
поиска точной нижней грани исходного функционала можно рассматривать на
параметризированном множестве экстремалей и, таким образом, перейти от
вариационной задачи в бесконечномерном функциональном пространстве к задаче
математического программирования в конечномерном пространстве.
Исследуется линейная стационарная
конечномерная система ![]() с дискретным временем
и ограниченным управлением
с дискретным временем
и ограниченным управлением
![]() ,
, ![]() ,
, ![]() ,
,
где ![]() - вектор состояния,
- вектор состояния, ![]() - вектор управления,
- вектор управления, ![]() - множество возможных значений управления,
- множество возможных значений управления, ![]() - матрица системы.
Основной задачей управления считается достижение начала координат из любого
начального состояния за конечное число шагов (задача 0-управляемости).
Управление выбирает в форме функции текущего времени и текущего вектора
состояния, т.е. изучается проблема синтеза управления в задаче 0-управляемости.
- матрица системы.
Основной задачей управления считается достижение начала координат из любого
начального состояния за конечное число шагов (задача 0-управляемости).
Управление выбирает в форме функции текущего времени и текущего вектора
состояния, т.е. изучается проблема синтеза управления в задаче 0-управляемости.
Показано, что для широкого класса вещественных конечномерных линейных дискретных систем с ограничениями условие существования в задаче достижения за конечное время 0 из произвольного начального положения в классе программных управлений эквивалентно условию разрешимости такой задачи в форме закона обратной связи по вектору состояния. Данное обстоятельство гарантируется наличием верхней блочно-треугольной жордановой вещественной формы для каждой вещественной матрицы и требованием принадлежности 0 внутренности множества ограничений на управление.
-
Сиротин А.Н.
«Аналитические решения в задаче оптимального управления вращением
осесимметричного тела» (принята к печати в журнале «Прикладная математика и
механика»в 2005 г.)
-
Сиротин А.Н.
«О решении задачи синтеза управления для класса линейных 0-управляемых
дискретных систем с ограничениями» ,Автоматика и Телемеханика, 2005, № 1, с. 49
– 58.
14.
Исследование краевой задачи для теории фильтрации в уравнениях Вольтерра.
Разнообразные процессы в природе и
технологических процессах описываются дискретными уравнениями Вольтерра. Задача
фильтрации для дискретных уравнений Вольтерра представляют большой интерес и
для теории уравнений Вольтерра и для многочисленных приложений. Эта задача
сводится к решению краевой задаче с двумя переменными – прямой и сопряженной.
Решение краевой задачи представляет собой
весьма сложную проблему.
Получена
важная зависимость между прямой и сопряженной переменными. Установление этой
зависимости дает возможность для конструктивного анализа различных задач
фильтрации с помощью вариационного подхода. Более того, используя краевую
задачу, получен рекуррентный алгоритм оценивания, аналогичный фильтру
Калмана.
РЕЗУЛЬТАТЫ
ИССЛЕДОВАНИЯ
1. Получена краевая задача.
2. Проведен анализ зависимости между
прямой и сопряженной переменными через
решение обобщенного уравнения Риккати.
3. Доказана симметричность решения
обобщенного уравнения Риккати в
редположении существования соответствующих обратных матриц.
4. Доказана искомая зависимость.
5. Доказана неотрицательная
определенность решения обобщенного
уравнения Риккати.
6. Выведен рекуррентный фильтр.
A. Bashkov, V.
Kolmanovskii, X. Mao, A. Matasov "
On a boundary value problem in the filtering theory for discrete volterra
equations " в американском журнале “Stohastic
analysis and applications”, 2005, vol.23 No.5.
A. Bashkov, V.
Kolmanovskii, G. De Nicolao, A. Matasov "Filtering problem for discrete
volterra equations with combined disturbances". (Proceedings of the 16TH
world IFAC congress, 2005, July, Prague)
-
Сделан и опубликован доклад на международной конференции 2005
International conference physics and control, Saint-Petersburg, August, 2005,N.
Ahmedova, V. Kolmanovskii, A. Matasov " Guaranteed filtering in delayed
dynamic systems" (proceedings of the 2005 international conference Physics
and control, Saint-Petersburg, August)