2.5.
Фундаментальные и прикладные научные исследования в области механики, систем
управления и информатики
Тема.
УПРАВЛЕНИЕ. Исследования в области динамики сложных механических систем,
проектирования орбит и построения математических моделей планирования
космических экспериментов.Научный руководитель д.т.н. Р.Р. Назиров
Исследования по динамике вращающегося
КА с полостью, частично заполненной жидкостью.
Рассмотрена
задача устойчивости вращающегося космического аппарата (КА) с полостью,
частично заполненной жидкостью на небольшую глубину, с учетом отличия угловых
скоростей вращения КА и жидкости и их переменности (режим стационарного
вращения, раскрутки и торможения вращения КА). Получены области устойчивости в
пространстве характерных параметров объекта и проведено математическое
моделирование возмущенного движения. Дано обобщение на случай нескольких
полостей.
Рассмотрена
новая концепция использования МГД – элемента в контуре управления вращающимся
КА. Синтезирована математическая модель вращающегося КА и гировертикали с МГД
исполнительными элементами.
Основные результаты содержатся в сданных в
печать 2-х статьях в журнале «Космические исследования» и опубликованы в журнале «Полет».
«Полет»,
№3, 2004
«Полет»,
№8, 2004
«Полет»,
№11, 2004
Научный руководитель: главный научный сотрудник,
д.т.н.,
профессор Б. И. Рабинович.
Тел. 333-20-23 (сл.); 313-56-45 (дом.).
E-mail: vprokhor@iki.rssi.ru
Управление малыми космическими
аппаратами.
Проведены
исследования и разработаны методы
управления движением при решении задач наведения и поддержания ориентации малых
космических аппаратов.
По
результатам исследований подготовлен и представлен доклад "Вопросы
управления движением малых космических аппаратов при наведении на заданные
точки на поверхности Земли" (авторы Д.И.Новиков, О.Ю.Седых, Н.А.Эйсмонт)
на семинаре "Вопросы миниатюризации в современном космическом
приборостроении".
Подготовлена
и оформлена заявка на патентование изобретения (номер 2004.115312) на способ
управления движением космических аппаратов с помощью использования
жидкокристаллических пленок (авторы Р.Р.Назиров, Н.А.Эйсмонт).
По
материалам исследований подготовлен и представлен доклад на 18 Международном
симпозиуме по динамике космического полета:
'Solar sails as a tool for spacecraft motion control near solar-terrestrial libration points', N.Eismont,R.Nazirov, Munich, 11-15 October 2004,
Ответственный исполнитель: ведущий научный
сотрудник,
к.т.н.
Эйсмонт Н.А..
Тел. 333-10-78
E-mail: neismont@iki.rssi.ru
Разработка архитектуры построения группировки орбитальных тросовых
систем.
Рассмотрена схема построения группировки орбитальных тросовых систем,
которая предназначена для перемещения космических объектов. Для реализации
космических полетов предлагается совместное использование прямого
преобразования электрической энергии на
борту КА, и движения с равновеликим
обменом масс по принципу фуникулера. На
основе этих результатов предложена схема
построения межпланетной космической станции.
Основные результаты изложены
в опубликованной и сданной в печать статьях:
И.М Сидоров. «Принципы
построения орбитальных тросовых систем» с 80-94.// Космические исследования, с.
80-94 т. 42, вып 1, 2004г,
Н. Н. Иванов, И.М. Сидоров,
Е. В. Емельянова «Исследование динамики управления тросовой системы в процессе
развертывания». Космические исследования.
Автор: д.т.н. Сидоров И.М.
Тел.333-14-89
Разработка алгоритмов управления сближением и стыковкой с использованием
оптических систем.
Рассмотрен альтернативный существующему
вариант управления причаливанием КА до момента их контакта. Более подробно исследована заключительная фаза процесса стыковки,
начиная от управления движением контактирующих объектов на небольших
расстояниях между ними, до момента механического контакта. Взаимное положение
объектов определяется на основе показаний позиционно-чувствительного
оптического датчика. Основные результаты были доложены на выездном семинаре в
г. Тарусе и содержатся в подготовленной к печати статье:
И.М. Сидоров, В.А.
Фролов «Метод автоматического управления причаливанием космических аппаратов, предназначенный для
сборки составных орбитальных конструкций».
Авторы: д.т.н. Сидоров И.М. и Фролов В.А.
Тел.333-14-89 E-mail: vfrolov@iki.rssi.ru
Исследование планетарных волн в системах: жидкость, ледяная оболочка с
приложением к океану спутников больших планет.
Рассмотрен возможный механизм возбуждения
планетарных и гироскопических волн в ячейках Томсона – Деланея океана спутника
Юпитера Европа типа параметрического резонанса. Предполагается, что в
основе этого механизма лежит изменение глубины жидкости в ячейке, обусловленное
приливными колебаниями под влиянием гравитационного возмущающего воздействия
Галилеевых спутников Юпитера.
Такая модель приводит к системе линейных
дифференциальных уравнений с периодическими коэффициентами типа Хилла, а при
некоторых дополнительных предположениях – к системе независимых уравнений
Матье.
Построены области устойчивости системы. Показана возможность возбуждения
гироскопических волн по схеме параметрического резонанса. Рассмотрено положение ячеек Томсона – Деланея
на поверхности Юпитера, в которых наиболее вероятно возникновение колебаний
жидкости упомянутого типа. Подготовлен к публикации препринт ИКИ.
Научный руководитель: главный научный сотрудник, д.т.н, профессор Б. И.
Рабинович.
Тел. 333-20-23 (сл.); 313-56-45 (дом.).
E-mail: vprokhor@iki.rssi.ru
Разработка геометрического метода выбора орбит ИСЗ.
Рассмотрены некоторые следствия гидродинамической
аналогии решения двукратно осредненной проблемы Хилла. Геометрическая
интерпретация этих решений позволила разработать геометрический метод анализа
долгопериодической эволюции и времени существования орбит ИСЗ в зависимости от
значений интегральных констант c1, c2, используемых в качестве
параметров.
Получено обобщение на случай квазистационарного
(слабо возмущенного под влиянием прецессии орбиты Луны) режима эволюции орбит,
соответствующей решению проблемы Хилла. Предложена физическая модель, воспроизводящая
возмущенное движение.
Выявлена существенная зависимость характера эволюции
и времени существования орбиты ИСЗ от углового расстояния z
между восходящими узлами орбит ИСЗ(W)
и Луны (WM)
на эклиптике, а также размера большой полуоси ИСЗ.
По материалам исследований сделаны доклады на
семинаре ИКИ под руководством проф. Р. Р. Назирова:
- «Об эволюции орбит ИСЗ под влиянием гравитационных
возмущений от Луны и Солнца и проблеме выбора долгоживущих высокоапогейных
орбит», март 2004 .
- «Параметрический анализ периодических и
условно-периодических движений в спутниковом варианте двукратно-осредненной
круговой задачи трех тел», октябрь 2004.
Сданы 2 статьи
в журнал «Космические исследования»
и выпущен препринт:
Б.И.
Рабинович, В.И. Прохоренко. «Некоторые следствия и обобщения гидродинамической
аналогии решения двукратно осредненной проблемы Хилла». Препринт ИКИ Пр.-2100,
20004 г.
Отв.исполнитель:
старший научный сотрудник, к.ф.-м.н. В. И. Прохоренко
Тел.
333-50-45
E-mail: vprokhor@iki.rssi.ru
Решение задач оптимизации движения с малой тягой.
Разработана
теория оптимизации перелетов космических аппаратов при ограничениях на
направление вектора тяги. Показано, что реальные ограничения на направление
тяги относятся к классу линейных, и для линейных ограничений решение задачи
оптимизации найдено в конечном виде. Разработан метод расчета оптимальных
перелетов при ограничениях на направление тяги, основанный на модифицированном
методе транспортирующей траектории. Создана программа расчета на компьютере
оптимальных перелетов при ограничениях на направление тяги. Результаты
исследований содержатся в сданных в журнал «Космические исследования» двух статьях и в вышедшей из печати статье:
Суханов
А. А., Прадо А. Ф. Б. де А., «Модификация метода транспортирующей траектории»,
Космические исследования, Т. 42, № 1, сс. 107-112, 2004.
Автор: старший научный сотрудник, к.ф.-м.н. А. А. Суханов
E-mail: sukhanov@iki.rssi.ru
Решение задач робастного оценивания.
В 2004 г. были продолжены
исследования в области решения оптимальных задач обобщенного линейного
программирования, возникающих при решении оптимальных задач оценивания и
коррекции. Была рассмотрена проблема почти
вырожденности при решении таких задач. Показано, что появление почти
вырожденного решения часто приводит к большому числу итераций, практически не
меняющих целевую функцию. Предложен новый метод решения такой проблемы. Он
заключается в переходе к эквивалентной строго вырожденной задаче линейного программирования, для которой
следующая итерация дает сравнимое с целевой функцией ее изменение. Результаты
подготовлены в виде статьи и доложены на семинаре в ИКИ в виде работы Бахшияна Б.Ц.:
«АЛГОРИТМ РЕШЕНИЯ ПОЧТИ ВЫРОЖДЕННЫХ ЗАДАЧ ЛИНЕЙНОГО
ПРОГРАММИРОВАНИЯ И ЕГО ПРИМЕНЕНИЕ В ЗАДАЧАХ КОСМИЧЕСКОЙ НАВИГАЦИИ».
Руководитель
работы:
ведущий научный сотрудник,
д.ф.-м.н. Б.Ц. Бахшиян
E-mail: bbakhshi@iki.rssi.ru
Решение задач
управления для дискретных систем.
Рассматривались
линейные стационарные системы с дискретным временем и ограниченным управлением.
Выделен класс 0-управляемых систем с частично диагонализируемыми матрицами, для
которых управление возможно построить в виде закона с обратной связью по
вектору состояния. Показано, что имеется класс систем с ограниченным управлением,
когда задача синтеза может быть эффективно решена. А именно, изучались линейные
стационарные системы с частично диагонализируемыми матрицами. Это означает следующее.
Разобьем жорданову каноническую форму матрицы системы на две подматрицы так,
чтобы первая соответствовала собственным значениям, абсолютные значения которых
совпадали со спектральным радиусом. Если эта подматрица диагональная, то исходная
матрица системы именуется частично диагональной. Показано, что в этом случае
для 0-управляемой системы возможно построение управления в виде нелинейной обратной
связи. При этом удается также показать, что это управление может быть построено
с помощью прямого метода Ляпунова, а функция Ляпунова совпадает с некоторой
нормой вектора состояния. Доказательство этого факта содержит и способ
построения управления.
Рассмотрен случай, когда начало координат является
внутренней точкой множества ограничений на управление. Результат может быть
продолжен и на 0-управляемые системы, когда 0 принадлежит всего лишь
относительной внутренности множества ограничений. Например, это имеет место при
скалярном управлении. В этом случае можно похожим образом построить управление,
которое зависело бы не только от текущего состояния, но и от некоторого числа
предшествующих.
Изучались некоторые особенности решений задачи
оптимального управления пространственной переориентацией и одновременным полным
торможением начального вращения абсолютно твердого сферического симметричного
тела для случая нефиксированного времени. Управлением служит главный момент
приложенных внешних сил. Качество управляемого процесса оценивается
интегральным функционалом, который характеризует суммарные энергозатраты,
необходимые для осуществления маневра. В частном случае такой функционал имеет
вид широко распространенного интегрально-квадратичного. Установлено, что задача
оптимального по энергозатратам управления переориентацией и одновременным
торможением твердого тела с нефиксированным временем в классе измеримых
управлений решений не имеет почти для всех начальных условий. Построена явным
образом одна из возможных минимизирующих последовательностей. Показано, что
наименьшие значения целевых функционалов в задаче переориентации с торможением
и в задаче полного торможения начального вращения совпадают. В частности,
переориентации сферически симметричного тела из положения покоя в положение
покоя соответствуют нулевые минимальные энергозатраты, если время окончания
процесса не фиксировать. При дополнительном предположении о строгой
нормированности доказана единственность решения задачи оптимального торможения.
Основные результаты опубликованы в журналах:
Известия
АН. Теория и системы управления, 2004, № 3, с. 18 – 27
Прикладная
математика и механика, 2004, том 68, вып. 5, с. 833 – 846
Journal of
Optimization Theory and Applications, 2004, vol. 122, No. 2, pp. 17 – 44.
Автор:
д.ф.-м.н. Сиротин А.Н., (договор подряда с ИКИ).
Исследование задачи
решения дискретных уравнений Вольтера.
Проблема решения дискретных
уравнений Вольтерра методом наименьших квадратов является нетривиальной задачей
ввиду огромного числа операций, необходимых для реализации оптимального
фильтра. В качестве приближенной модели начальной системы выбрано разностное
уравнение небольшой размерности. Тогда
преобразованный фильтр Калмана может быть использован для получения эффективной оценочной функции. Для такой
оценки найден уровень
неоптимальности путем применения теории
двойственности для выпуклой вариационной задачи. Этот уровень может быть эффективно вычислен
без получения точного решения задачи фильтрации.
Результаты работы изложены
в статье в журнале:
STOCHASTIC ANALYSIS AND APPLICATIONS, 2004, Vol.22, Number 4,
pp.1085-1110
Автор:
д.ф.-м.н. Матасов А.И., (договор
подряда с ИКИ).
Тема ВЕКТОР – УС. Исследования, разработка и моделирование
аппаратно-программных решений задачи высокоточных астроопределений, проводимых
для управления ориентацией космических объектов.
Научный
руководитель д.т.н. Г.А. Аванесов, тел.333-30-89, avanesov @ ofo.iki.rssi.ru
За отчетный период разработаны алгоритмы
математического обеспечения решения задачи определения инерциальной ориентации
в темпе измерения параметров угловой скорости, предложены пути повышения допустимой угловой
скорости, помехозащищенности и быстродействия определения ориентации.
Описание математического
обеспечения
Предлагается определять инерциальную ориентацию, опираясь на параметры
углового движения космического аппарата, путем обработки изображения с
ПЗС-матрицы в двух каналах (рис. 1).
Рис.
1 Функциональная схема построения оптического звездного датчика (ОЗД)
Канал
определения угловой скорости может быть реализован как оптическим так и
гироскопическим путем. Оптический путь состоит в обработке соседних изображений
звезд, а гироскопический – в непосредственном измерении величины проекции
вектора угловой скорости КА на ось чувствительности гироскопа. В отчете описан
оптический путь реализации канала измерения угловой скорости. При этом
рассмотрен способ повышения его быстродействия и помехозащищенности.
По
мере накопления информации в процессе работы прибора в алгоритме определения
инерциальной ориентации можно выделить 3 этапа:
I.
Начальное
измерение.
II.
Второе
измерение.
III.
Очередное
измерение.
На этапе начального измерения выполняется
первое экспонирование и накапливается информация, необходимая для определения
угловой скорости движения. На этапе второго измерения выполняется второе
экспонирование, определяется величина угловой скорости движения КА, начинается
построение «виртуального кадра». «Виртуальный кадр» представляет собой
координаты ранее изобразившихся звезд в системе координат текущего изображения.
Если «виртуальный кадр» содержит более четырех звезд, проводится определение
инерциальной ориентации, и формируются окна вокруг изображений звезд. На этапе
очередного измерения выполняется, помимо вышеописанных действий, проецирование
окон на текущее изображение. Далее вся последующая обработка проводится на
этапе очередного измерения. Блок-схема алгоритма определения ориентации на
этапе очередного измерения представлена на рис. 2.
Рассмотрим процесс выбора порогового уровня
программного фрагментатора, под которым подразумевается программная реализация
устройства выделения изображений звезд над уровнем фона. В качестве исходной
информации используется число локализованных объектов. Порог подбирается таким
образом, чтобы их число находилось в заданных пределах от 2-х до 16-ти.
Алгоритм процесса определения вектора угловой
скорости КА основан на контурном подходе к совмещению двух изображений. Суть
подхода заключается в выборе такой пары объектов на соседних изображениях,
параметры которой имеют наибольшую вероятность приращения координат. При этом
исключаются помеховые объекты, вызванные влиянием солнечных вспышек, протонного
излучения и подсвеченными Солнцем частицами космического пространства.
Рис.2. Блок-схема процесса «Очередное измерение»
алгоритма определения параметров инерциальной ориентации
Алгоритм процесса определения параметров
углового движения состоит из следующих четырех этапов:
- Определение
перемещения с максимальным весом
- Формирование
таблицы соответствия
- Расчет
элементов матрицы взаимной ориентации
- Определение
направления вектора угловой скорости и ее величины
При определении перемещения с максимальным
весом используются массивы локализованных объектов текущего и предыдущего
изображений. В результате процесса будут получены: значение максимального веса
пары, индексы массивов, соответственной пары звезд, разности абсцисс, ординат и
угол между энергетическими центрами каждой пары.
Для каждой пары звезд проверяются их
параметры на соответствие параметрам пары с максимальным весом. Степень
соответствия определяется размером элемента разрешения.
Матрица взаимной ориентации выражается через
последовательные повороты вокруг 3 осей координат на углы j, q, y, которые определяются для каждой пары соответственных
точек на основе решения системы уравнений коллинеарности методом
последовательных приближений по способу наименьших квадратов:
 (1)
(1)

где x1 – абсцисса центра изображения звезды на предыдущем изображении,
y1 – ордината центра изображения звезды на предыдущем изображении,
x2 – абсцисса центра изображения звезды на текущем изображении,
y2 – ордината центра изображения звезды на текущем изображении,
aij – элементы матрицы взаимной ориентации,
f, x0, y0 – фокусное расстояние и координаты главной точки оптической системы
ОЗД.
Направление оси вращения и угол поворота
выражаются через матрицу преобразования A на основании следующих соотношений:
 (2)
(2)
Абсолютное значение угловой скорости w и составляющие угловой скорости по осям
внутренней системы координат wx, wy, wz определяются на основе формулы (3):
 ,
,  ,
,  ,
,  (3)
(3)
Математическое обеспечение оптического
звездного датчика должно решать следующие задачи:
· повышение быстродействия определения
инерциальной ориентации
· повышение помехозащищенности
· повышение допустимой угловой скорости
вращения КА
Верификацией математического обеспечения является проверка выполнения
поставленных задач в процессе обработки результатов эксперимента. Указанные
задачи могут быть успешно решены за счет измерения угловой скорости, как
средствами самого звездного координатора, так и при помощи гироскопов.
Быстродействие выдачи параметров инерциальной ориентации повышается за счет
того, что они могут быть получены в темпе измерения параметров углового
движения гироскопическим или оптическим методом измерения угловой скорости.
Экспериментально установлено, что темп определения параметров углового движения
составляет свыше 20 Гц при их измерении гироскопом и 5 Гц при их измерении
средствами оптического звездного датчика.
Помехозащищенность волоконно-оптических гироскопов (ВОГ) от протонных
вспышек и световых помех значительно выше, чем у ОЗД. Так при отказах в работе
звездных датчиков, вследствие сложной помеховой ситуации, основную роль в
определении параметров инерциальной ориентации берут на себя измерители угловой
скорости.
Существенным недостатком ВОГ является необходимость в периодической
коррекции его масштабных коэффициентов, которая может выполняться по данным от
звездных координаторов.
При совместной работе звездного координатора и ВОГ помимо увеличения
быстродействия и помехозащищенности, также в десятки раз увеличивается
допустимая угловая скорость движения КА.
При использовании оптических методов определения угловой скорости
допустимая угловая скорость увеличивается с 5’/c до 30’/c.
При верификации математического обеспечения
ОЗД проводились следующие испытания:
- Верификация
определения инерциальной ориентации
- Верификация
определения значения угловой скорости оптическим методом
- Определение
инерциальной ориентации в темпе определения угловой скорости
При верификации алгоритмов определения
инерциальной ориентации использовалось следующее свойство инерциальной
ориентации: если система координат прибора неподвижна, то склонение оси Z ПСК в ходе проведения эксперимента должно
быть постоянным. Данное свойство является следствием, того, что при суточном
движении небесной сферы изменяется прямое восхождение анализируемого
направления, при этом его склонение не изменяется.
При верификации ОЗД астроприбор закреплялся
на неподвижной площадке, при этом ось Z
ПСК была направлена в Зенит. Прибор проводил съемку звездного неба и вычислял
параметры инерциальной ориентации.
В результате верификации был построен график
изменения склонения прибора (см. рис.3).
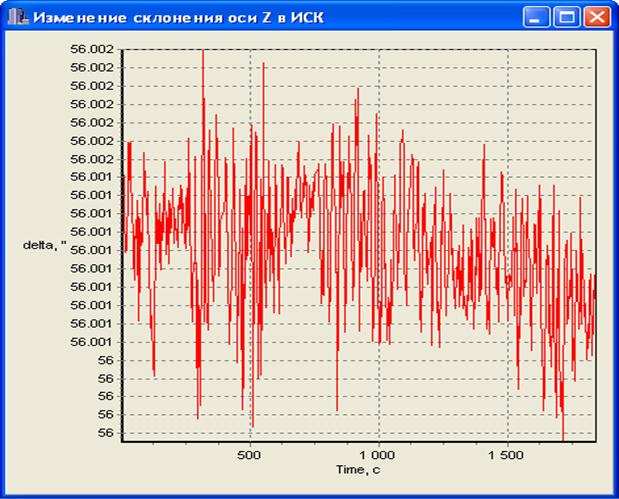
Рис. 3 График изменения склонения звездного
координатора
На графике наблюдаются высокочастотные
колебания склонения прибора вокруг среднего уровня. Данные колебания вызваны
как ошибками при определении инерциальной ориентации, так и колебаниями здания.
Отличие среднего уровня от широты места наблюдения (55° 45’) обусловлено неточностью выставки оси Z прибора в зенит.
С.к.о колебаний склонения оси Z в инерциальной системе координат составило 6
угловых секунд. Ошибка из-за неточности выставки оси Z в зенит составила 1°15’.
При верификации определения значения угловой
скорости использовался динамический стенд испытаний звездного координатора. Он
позволяет устанавливать движение изображений звезд, имитирующее угловую
скорость вращения КА. Для верификации определения значения угловой скорости на
стенде устанавливалась угловая скорость 240”/c. В результате верификации был построен
график изменения угловой скорости (см. рис. 4):
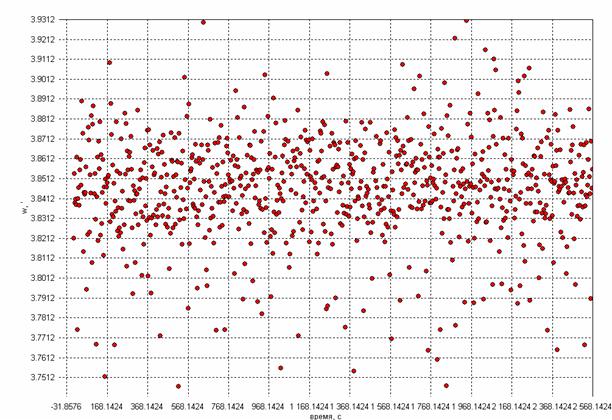
Рис. 4. График изменения угловой скорости
Из рисунка видна ошибка определения угловой
скорости по соседним изображениям.
Среднеквадратическая ошибка составила 1.5”/c
Среднее значение угловой скорости 3.841’/c
Отличие средней измеренной скорости от
устанавливаемой составляет 0.169’/c.
Данное отличие обусловлено неточностью выдерживания угловой скорости движения
по орбите динамическим стендом испытаний. Флуктуации угловой скорости
обусловлены неточностью определения значения угловой скорости звездным
координатором.
В ходе проведения эксперимента проводился
контроль обработки видеоинформации математическим обеспечением. При этом были
получены матрица взаимной ориентации, построен виртуальный кадр и вычислены
параметры углового движения КА. Точность определения угловой скорости составила
3”/c.
Дальнейшие
направления работ
В качестве дальнейших направлений работ по
теме стоит указать следующие:
1. Изготовление прибора, решающего задачу
определения инерциальной оиентации в темпе измерения угловой скорости.
2. Проработка вопроса определения угловой
скорости не только по изображениям звезд, но и по изображениям Земной
поверхности с ПЗС матрицы прибора.
Тема ВСКИ. Исследование проблемы
прецизионного координатно-временного обеспечения (КВО) видеоспектрометрических
космических исследова-ний Земли и других небесных тел, реализуемого по данным
бортовых навигационных измерений. Разработка и моделирование
аппаратно-программных решений задачи КВО.
Научный
руководитель д.т.н. Г.А. Аванесов, тел.333-30-89, avanesov @ ofo.iki.rssi.ru
1. Координатно-временное
обеспечение видеоспектрометрических космических исследований
Проблема прецизионного координатно-временного
обеспечения (КВО) видеоспектрометрических космических исследований Земли и
других небесных тел, осуществляемых по данным бортовых навигационных измерений,
включает в себя решение следующих задач:
– определение
параметров орбиты и местоположения на ней КА;
– определение
инерциальной, орбитальной или других видов ориентации КА;
– формирование
системы бортового и единого (Гринвичского) времени;
– координатная
привязка материалов съемок и измерений, проводимых с КА, осуществляемая в
различных системах координат – звездной, орбитальной, географической, КА и др.;
– выдача
данных по решаемым задачам в реальном и квазиреальном времени.
Упрощенная принципиальная блок-схема
бортового комплекса КВО представлена на рис.1.
Рис.1. Упрощенная блок-схема бортового комплекса
КВО
Решение проблемы КВО следует рассмотреть для
КА, находящихся на орбите низколетящих искусственных спутников Земли, для геостационарных
и высокоапогейных ИСЗ и для КА на межпланетных траекториях.
За отчетный период было рассмотрено решение
проблемы КВО для низколетящих ИСЗ, в частности, для ИСЗ, решающих задачи
дистанционного зондирования Земли.
Разрабатываемый для таких ИСЗ комплекс КВО
включает две существующие измерительные системы:
– навигационную
систему, включающую бортовую аппаратуру спутниковой навигации (АСН),
разработанную в Российском институте радионавигации и времени по заказу и
совместно с РКК "Энергия" (аппаратура функционирует на Международной
космической станции);
– систему
определения инерциальной ориентации на основе приборов БОКЗ-2М, разработанную в
Оптико-физическом отделе (ОФО ИКИ), прототипы которой успешно функционируют на
трех телекоммуникационных геостационарных ИСЗ "Ямал", на
Международной космической станции и на одном КА ДЗЗ.
Кроме этих двух измерительных систем,
разрабатываемый бортовой комплекс КВО будет включать вычислительную систему
процессоров обработки данных (ПОД) измерений.
Такая система может быть создана в ОФО ИКИ на
базе проведенных по другим проектам разработок бортовых вычислительных средств
и их программного обеспечения.
Схема предлагаемого бортового комплекса КВО
представлена на рис.2.
Рис.2 Блок-схема комплекса координатно-временного
обеспечения (ККВО)
Комплекс включает:
– два
приемника АСН, один из которых находится в холодном резерве;
– два
блока определения координат звезд БОКЗ-2М, работающих одновременно (при работе
одного БОКЗ-2М задача решается с несколько пониженной точностью);
– два
процессора обработки данных, один из которых находится в холодном резерве.
АСН состоит из следующих функциональных
блоков:
– антенного
блока АФУ,
– малошумящего
усилителя МШУ,
– навигационно-приемного
модуля НПМ.
Антенно-фидерное устройство и малошумящий
усилитель обеспечивают усиление и частотную избирательность, необходимые для
работы навигационно-приемного модуля.
Навигационно-приемный модуль выполняет поиск
и слежение за сигналами навигационных спутников (НС) радионавигационных систем
ГЛОНАСС (Россия) и НАВСТАР (США), прием информационных сообщений от НС и
проведение координатно-временных определений координат спутников и скоростей их
измерений в геоцентрической (географической) системе координат, а также
мирового (Гринвичского) звездного времени со среднеквадратическими ошибками по
местоположению ± 25 м, по скоростям ± 0,07 м/с, по времени ± 1 мкс.
БОКЗ-2М, в отличие от своих предшественников
– БОКЗ, БОКЗ-У и БОКЗ-М, позволяет определять с высокой точностью не только
элементы ориентации, но и угловые скорости их изменения. Это позволит
использовать предлагаемый комплекс КВО в качестве системы управления движением
и ориентацией КА. Принципиальной особенностью и важным достоинством указанной
системы в отличие от всех существующих систем управления КА является отсутствие
в ней гироинерциальных измерителей, что ведет с одной стороны к повышению
надежности системы управления и с другой стороны к уменьшению ее
массо-габаритных характеристик и энергопотребления.
БОКЗ-2М позволяет определять элементы
ориентации и угловые скорости их изменения с точностями, соответственно 2
угл.сек. и 2 угл.сек. в секунду времени при наличии в поле зрения каждой камеры
менее четырех зарегистрированных звезд.
В основе вычислительной системы комплекса КВО
будут использоваться 32-х разрядный процессор ADSP-2106 с возможностью выполнения операций с
"плавающей точкой". Частота работы процессора – 16 МГц, постоянная
память программ – 256 Кбайт, оперативная память данных/программ – 512 Кбайт.
К сожалению, ограниченность финансирования
работ по теме не позволила разработать конструкторскую документацию и создать
макеты большинства элементов комплекса КВО.
2. Разработка,
изготовление и испытания макета камеры наблюдения Марса миссии
"Фобос-Грунт"
В 2004 году в отделе № 57 при поддержке
Автономной некоммерческой организации
"Космос-Наука и Техника" продолжались работы, имевшие целью
создание камеры наблюдения Марса (КНМ) с поверхности Фобоса в рамках миссии
"Фобос-Грунт".
За отчетный период в отделе были
проведены работы по созданию действующего макета прибора КНМ, а также
осуществлены пробные съемки, позволившие подтвердить правильность выбранного
облика прибора и отработать отдельные примененные в нем схемотехнические
решения.
В отчете приведено краткое
описание созданного макета КНМ, рассмотрена схема проведенных испытаний,
описана установка для проведения испытаний макета КНМ и приведены полученные
при испытаниях результаты.
2.1. Состав и краткое описание макета КНМ
Созданный макет по основным
техническим решениям повторяет реальный прибор КНМ и позволяет проводит
регистрацию изображений, получаемых входящими в его состав линейными
ПЗС-детекторами. Макет позволяет отрабатывать функционирование модуля
видеотракта и процесс формирования изображения. На данном этапе работы в макет
КНМ не были включены аппаратные средства, позволяющие осуществлять съемку в
различных режимах, проводить сжатие и хранение полученных изображений во
внутренней памяти. Кроме того, в макете КНМ не реализован модуль вторичных
источников питания и программное управление работой по интерфейсу
информационного обмена MIL STD-1553B.
Созданный макет КНМ
включает видеоблок и блок электроники и конструктивно представляет собой
моноблок. Функциональная схема макета КНМ приведена на рис.2.1. В ее основе
лежит функциональная схема будущего прибора КНМ (см. Эскизный проект на
комплекс научной аппаратуры. Проект "Фобос-Грунт". Камера наблюдения
Марса. НРДК.201229.001.ЭП). На схеме показаны все функциональные блоки и модули
прибора КНМ. Серым фоном выделены модули прибора КНМ, не реализованные в макете
КНМ, белым - реализованные или частично реализованные модули. В состав
видеоблока макета КНМ входят объектив и три ПЗС-линейки, размещенные на модуле
видеотракта. В макете КНМ не установлены спектральные светофильтры, за которыми
должны располагаться ПЗС-линейки. Вместо объектива Орион 6/50 в макете КНМ
использован объектив Уран 27 с фокусным расстоянием 100 мм. Модуль видеотракта
макета КНМ полностью повторяет модуль видеотракта будущего прибора КНМ. Он
представляет собой многослойную печатную плату с
установленными электронными элементами. Основными элементами платы видеотракта являются три линейных ПЗС ILX508A производства фирмы Sony, осуществляющие
преобразование светового излучения в электрические сигналы. Кроме того, модуль
видеотракта включает видеопроцессор
AD9826, осуществляющий
усиление полученных электрических сигналов и их преобразование в цифровую форму.
Съемка макетом КНМ производится на фиксированной частоте 160 Гц.
Рис.2.1. Функциональная схема макета КНМ.
В
блоке электроники макета КНМ частично реализован процессорный модуль будущего
прибора КНМ. Структурная схема блока электроники макета
КНМ представлена на рис.2.2. В ее основе
лежит структурная схема блока электроники прибора КНМ (см. Эскизный проект на
комплекс научной аппаратуры. Проект "Фобос-Грунт". Камера наблюдения
Марса. НРДК.201229.001.ЭП). На схеме показаны все функциональные блоки и модули
блока электроники прибора КНМ. Серым фоном выделены модули прибора КНМ, не
реализованные в макете КНМ, белым - реализованные модули. Процессор
предварительной обработки видеоданных макета КНМ, реализованный на
программируемой вентильной матрице ХС4010 фирмы Xilinx,
осуществляет прием и формирование потоков видеоданных, а также формирование
временной диаграммы работы ПЗС-линеек.
Структура
программируемой вентильной матрицы процессора предварительной обработки
видеоданных (являющаяся аналогом его программного обеспечения) размещена в
постоянном запоминающем устройстве (ПЗУ) фирмы Austin.
В состав блока
электроники макета КНМ не включены процессорный модуль, который должен реализовывать различные режимы съемки, сжатие
данных и служить арбитром при передаче данных по внутренней информационной шине
блока электроники КНМ. Также в состав блока электроники макета КНМ не включен модуль памяти, предназначенный для хранения
полученных видеоданных до сеанса связи по радиоканалу.
Получаемые макетом КНМ видеоданные без
промежуточной обработки и сжатия передаются на внешний управляющий компьютер,
осуществляющий их запись на магнитный носитель, а также последующую обработку и
визуализацию. Передача видеоданных из макета КНМ производится в темпе съемки по
интерфейсу Camera Link, реализованному на микросхеме DS90CR238.
Рис.2.2. Структурная
схема блока электроники макета КНМ.
Вместо
интерфейса MIL STD-1553B внешнее управление режимами работы макета
КНМ осуществляется с внешнего управляющего компьютера по последовательному
интерфейсу. Для этого в состав блока электроники макета КНМ включены микросхемы
DS90C031 и DS90C032.
Модуль вторичных
источников питания в макете КНМ не реализован. Питание электрических цепей
видеоблока и блока электроники макета КНМ осуществляется от внешнего источника
с напряжениями +5 В и +9 В.
2.2. Технические характеристики макета КНМ
Технические характеристики основных
составляющих элементов созданного макета КНМ приведены в табл.1. Общие
технические характеристики макета КНМ приведены в табл.2. Для сравнения в
отдельном столбце приведены характеристики создаваемого прибора КНМ.
Отсутствие необходимых светофильтров не
позволило в макете КНМ реализовать многозональную съемку. Однако эти отличия не
принципиальны при отработке видеотракта. Использование в макете КНМ более
длиннофокусного объектива привело к двукратному уменьшению углового и
пространственного разрешения. Замена в макете КНМ интерфейса
MIL STD-1553B на интерфейс Camera Link
позволила осуществить пробные съемки с использованием управляющего компьютера
без специальной КИА.
Таблица 1
Технические характеристики
основных элементов макета КНМ
|
Объектив
|
Уран
27
|
|
Фокусное расстояние
|
100 мм
|
|
ПЗС
линейка
|
Sony ILX508A
|
|
Количество эффективных чувствительных
элементов
|
7926
|
|
Размер/шаг чувствительных элементов
|
7x7 мкм / 7 мкм
|
|
Максимальная рабочая частота
|
12,5 МГц
|
|
Модуль
видеотракта
|
AD 9826
|
|
Разрядность
|
16 бит
|
|
Максимальная частота преобразования в
цифровой код
|
18 МГц
|
|
Программируемый коэффициент усиления
|
от 6 дБ до 38 дБ
|
|
Процессор
предварительной обработки видеоданных
|
Xilinx XC4010
|
|
Объем программируемой вентильной матрицы
|
более 10000 вентилей
|
Таблица 2
Общие технические характеристики макета КНМ и
создаваемого прибора КНМ
|
Характеристики
|
макет
КНМ
|
будущий
прибор КНМ
|
|
Спектральные диапазоны
|
панхром.
0,38-1,1 мкм
|
0,45,
0,6, 0,8 мкм
|
|
Количество ПЗС-линеек
|
3
|
3
|
|
Количество
чувствительных элементов в строке
|
8000
|
8000
|
|
Угловое разрешение
|
14.4''
|
28.9''
|
|
Угловое поле зрения
|
31.3°
|
58.5°
|
|
Объем встроенной памяти для изображений
|
-
|
8 Мбайт
|
|
Частота строчного сканирования
|
160 Гц
|
0.629 Гц
|
|
Разрядность выходного сигнала
|
16 бит
|
8 бит
|
|
Напряжение электропитания
|
5 В, 9 В
|
27 В / (23-32 В)
|
|
Интерфейсы информационного обмена
|
последовательный,
Camera Link
|
MIL STD-1553B
|
2.3. Цель и методика испытаний макета КНМ
Испытания макета КНМ проводились
с целью проверки работоспособности будущего прибора в условиях, имитирующих
съемку поверхности Марса с КА "Фобос-Грунт", находящегося на поверхности Фобоса, а также уточнения
чувствительности и динамического диапазона приемного видеотракта по результатам
анализа полученных изображений.
Функциональная схема проведения
испытаний макета КНМ приведена на рис.2.3.
Для проведения съемок макетом
КНМ были использованы:
- поворотная платформа (1) с посадочным местом макета КНМ (2);
- шаговый двигатель (3) с блоком питания, блоком управления (4) и
генератором импульсных сигналов;
- управляющий
компьютер (6), оснащенный платой ввода изображения Matrox Meteor-II CL (5) по
Camera Link интерфейсу.
Рис.2. Функциональная схема проведения испытаний
макета КНМ.
Установка макета КНМ осуществлялась таким
образом, чтобы его оптическая ось была ориентирована горизонтально, а
ПЗС-линейки оптического блока были ориентированы вдоль местной вертикали.
Поворотная платформа обеспечивала возможность вращения установленного на ней
макета КНМ вокруг вертикальной оси. Поворотная платформа приводилась в движение
шаговым двигателем (3), обеспечивающим постоянную угловую скорость вращения.
Таким образом, при вращении поворотной платформы линейные ПЗС-детекторы макета
КНМ формировали панорамное изображение.
Выбор скорости вращения осуществлялся вручную от блока управления двигателем
(4).
Управляющий компьютер (6)
осуществлял управление макетом КНМ, изменяя параметры съемки - коэффициент
усиления, смещение нулевого сигнала, т.н. «уровень черного», а также прием
видеоинформации от макета КНМ по интерфейсу Camera Link, регистрацию полученных изображений на
магнитном носителе и их последующую обработку. Для этого управляющий компьютер
был снабжен специализированной платой ввода видеоинформации Matrox Meteor-II CL (5), а также
специализированным и общесистемным программным обеспечением.
Одним из основных требований по
назначению к разрабатываемому прибору КНМ является способность формирования и
одновременного получения изображения марсианской поверхности при движении КА
"Фобос-Грунт" вместе с Фобосом по орбите вокруг Марса. Изображения
должны регистрироваться одновременно в трех спектральных зонах и после
специальной обработки и сжатия передаваться по радиоканалу на Землю.
Эксперименты по съемке изображений макетом КНМ, расположенным на поворотной
платформе, позволили отработать электронику видеоблока КНМ и подтвердить
возможность регистрации изображений макетом КНМ в трех каналах. Несмотря на
отсутствие в макете КНМ светофильтров, таким образом, подтверждается
возможность одновременной съемки тремя линейными ПЗС-детекторами.
Программа испытаний предусматривала
проведение съемки макетом КНМ в двух режимах:
– "темновом"
(при неподвижной платформе и закрытом объективе);
– "панорамном" (в реальном времени
при поворачивающейся платформе).
Съемка в "темновом"
режиме позволила оценить уровень темнового сигнала видеотракта макета КНМ.
Съемка в "панорамном" режиме позволила зарегистрировать изображения
объектов и оценить характеристики оптико-электронного тракта макета КНМ. В
качестве объекта съемки в "панорамном" режиме был выбран вид панорамы
городской застройки из окна лаборатории.
Программное обеспечение
управляющего компьютера обеспечивало преобразование полученных изображений в
графический формат BMP.
Визуализация изображений и их статистическая обработка осуществлялись с
использованием программного обеспечения обработки изображений Adobe Photoshop.
Качественная оценка оптико-электронного тракта
осуществлялась по следующим критериям:
1.
уровень
темнового сигнала при закрытом объективе;
2.
динамический
диапазон значений яркости на изображениях по результатам съемки в
"панорамном" режиме;
3.
вид
распределения значений яркости на изображениях (гистограмма кадра) по
результатам съемки в "панорамном" режиме;
4.
изменение
трех вышеперечисленных характеристик при изменении параметров съемки
(коэффициент усиления, смещение нулевого сигнала).
2.4. Результаты испытаний макета КНМ
При испытаниях макета КНМ
проведено несколько десятков съемок, как в "панорамном", так и в
"темновом" режимах. Съемки в "панорамном" режиме
проводились при разных условиях освещенности в разное время суток. Один из
полученных фрагментов изображений, при "панорамных" съемках,
представлен на рис.2.4. В табл.3 приведены результаты статистической обработки
трех из полученных фрагментов и результаты оценки уровня темнового сигнала.

Рис.2.4. Фрагмент изображения
Таблица 3
Результаты
статистической обработки фрагментов изображений,
полученных при испытаниях макета КНМ и оценки уровня темнового сигнала
|
|
Среднее
|
СКО
|
Диапазон
|
|
Темновой сигнал
|
955-1120
|
36,0-45,0
|
705-1340
|
|
Фрагмент 1
|
24542
|
-
|
5885-50095
|
|
Фрагмент 2
|
25766
|
-
|
4674-52465
|
|
Фрагмент на рис.2.4.
|
25619
|
-
|
5699-55212
|
Исследование уровня темнового
сигнала, проведенное по нескольким съемкам продемонстрировало его приемлемое
значение при любых параметрах съемки - 1.7% динамического диапазона.
При съемках в
"панорамном" режиме изменение коэффициента усиления и смещения нулевого
сигнала позволяло во всех случаях добиться распределения зарегистрированных
значений яркости пикселов практически по всему возможному диапазону
представления 16-ти разрядных измерений (от 0 до 65535) - 67-76%.
2.5. Выводы
Испытания созданного макета КНМ
подтвердили его работоспособность, что подтверждает правильность принятых при
разработке эскизного проекта видеоблока КНМ схемотехнических решений.
Продемонстрирована возможность КНМ к одновременной съемке в трех каналах и
удовлетворяющие требованиям ТЗ на КНМ характеристики получаемых изображений.
Видеоблок КНМ позволяет формировать изображения с 11-ю значащими разрядами, что
требует проведения программного переквантования сигналов для представления их
8-ми разрядным кодом на выходе КНМ. Для обеспечения наибольшего динамического
диапазона регистрируемых изображений необходимо обеспечить возможность гибкого
программного управления параметрами работы видеотракта КНМ - коэффициентом
усиления и смещением нулевого сигнала.
3. Разработка,
изготовление для миссии "Фобос-Грунт" лабораторного образца системы
информационного обеспечения (СИОК)
Работы по указанному разделу Плана 2004 года проводились в рамках
контакта с НПО им.С.А.Лавочкина, и потому в настоящем отчете подробно не
представляются.
За отчетный период выполнены следующие работы:
3.1. Разработаны
схемы электрические принципиальные:
– узла центрального
процессора и дублированного интерфейса мультиплексного канала для резерва
модуля процессора НРДК.467489.010;
– узла формирователя
вторичных напряжений +5В и -15В резерва модуля источника вторичного
электропитания НРДК.436734.010.
3.2. Изготовлены
и настроены макеты:
– узла центрального
процессора и дублированного интерфейса мультиплексного канала;
– узла формирователя
вторичных напряжений +5В и -15В.
3.3. В
ходе настройки получены следующие основные результаты:
– обнаружены и исправлены
схемотехнические и конструкторские ошибки при разработки электрических
принципиальных схем и печатных плат узлов модуля процессора и модуля источника
вторичного электропитания;
– схемотехнические
решения узла центрального процессора и дублированного интерфейса
мультиплексного канала и узла формирователя вторичных напряжений +5В и –15В
могут быть применены при разработке комплекса КД на технологический образец
системы СИОК.
Тема ИНТЕЛЛЕКТ.
Разработка телекоммуникационных технологий и информационное обеспечение
космических экспериментов. Научный руководитель д.т.н. Р.Р. Назиров
Работа по созданию
информационная системы оценки риска для
здоровья населения в связи с загрязнением окружающей среды.
С помощью создаваемой
информационной системы была проделана исследовательская работа по оценке риска
для здоровья населения Москвы в связи с загрязнением атмосферного воздуха
выбросами ТЭЦ. Построена ранжировка ТЭЦ по воздействию на различные территории
г. Москвы. Работа выполнена совместно с Научно-исследовательского институтом
экологии человека и гигиены окружающей среды им. А.Н. Сысина и доложена в СЭС
Москвы. Результаты работы и описание методики расчетов размещены на сайте
информационной системы по адресу http://www.iki.rssi.ru/ehips/Moscow/MoscowStep1.htm
и http://www.iki.rssi.ru/ehips/Moscow/MoscowStep2.htm.
Руководитель работ:
к.т.н. В.В.Егоров, тел. 333-3589, e-mail: egorov@iki.rssi.ru
Распознавание и синтез рентгеновских изображений
Целью работы является создание
приборного и математического обеспечения для томографической идентификации
структурных характеристик поверхностных слоев объекта по альбедному полю
рассеянного рентгеновского излучения.
Был разработан алгоритм математической обработки альбедного поля
рентгеновского излучения для распознавания и синтеза изображения рассеивателя.
Физическая основа
идентификации.
Для
идентификации структуры объекта необходимо сканирование участка поверхности
узким пучком рентгеновского излучения и регистрация интенсивности всего
обратнорассеянного неколлимированного излучения большим детектором (рис.1).


Рис. 1. Схема сканирования
Данная
регистрация обратнорассеянного излучения позволяет получить альбедные лучевые
суммы, на основе которых осуществляется восстановление (реконструкция)
линейного коэффициента рассеяния mС
 , (1)
, (1)
где
SС(x, j) - измеренная лучевая сумма
коэффициентов рассеяния,
mС(i,j) -
линейный коэффициент рассеяния i,j-го пикселя объекта,
ΔL(i,j) - величина пути фотона в i,j-м пикселе объекта,
N0 - исходное число фотонов,
Nd(x,j) - число рассеянных и зарегистрированных детектором
фотонов при вводе излучения в координату x при угле ввода j.
kx,j - отношение коэффициентов комптоновского
рассеяния к полному при текущем сканировании для заданной энергии исходного
излучения,
ax,j -
доля рассеянного излучения, зарегистрированная детектором при текущем
сканировании.
Все
обратнорассеянное излучение регистрируется большим неколлимированным
детектором.
Именно за
счет существенного (на несколько порядков) увеличения доли регистрируемых
фотонов за счет использования большого кристалла и регистрации практически всех
обратнорассеянных фотонов обеспечивается высокая производительность поиска.
Данная
система линейных уравнений разрешается относительно неизвестных линейных
коэффициентов рассеяния при известной (измеряемой) величине лучевой суммы.
Результаты моделирования.
В качестве
объекта моделирования использовалось земельное полотно (рис.2) с кремниевыми
включениями и порами. По полученной лучевой сумме (степень засветленности определяет величину
лучевой суммы) осуществлялось решение системы уравнений (1) и восстанавливалось
распределение линейного коэффициента комптоновского рассеяния.
Объект

 Лучевая
сумма
Лучевая
сумма


Реконструкция


Рис. 2. Результаты моделирования
Как видно,
полученное распределение линейного коэффициента рассеяния достаточно адекватно
представляет распределение плотности в объекте.
Экспериментальная
реконструкция
 На
представлена первая полученная 17.11.2004 экспериментальная реконструкцияя
объекта на основе неколлимированного рассеянного излучения. В качестве объекта
использовался вентилятор («cooler»)
персонального компьютера.
На
представлена первая полученная 17.11.2004 экспериментальная реконструкцияя
объекта на основе неколлимированного рассеянного излучения. В качестве объекта
использовался вентилятор («cooler»)
персонального компьютера.
Как видно, на реконструкции
достаточно явно проявляются ротор вентилятора. Относительно слабая разрешающая
способность обусловлена широким пучком исходного излучения (2 мм) и малым
размером детектора (10 мм в диаметре).
Данная
экспериментальная реконструкция доказывает принципиальную возможность
построения томографа на обратнорассеянном неколлимированном излучении.
Результаты
исследований отражены в публикациях
конференций:
Научная
конференция фгуп-внмм технической
физики и автоматизации 2004 г.
16-я
Всероссийская конференция 2004 г. «Неразрушающие методы контроля и диагностика»
и представленной к публикации статье в журнале DT&E - Non-Destructive Testing and Evaluation
(London)
Автор: старший научный сотрудник,
д.т.н.
В.А. Горшков,
Е-mail gorshkov_va@mtu-net.ru
Разработка системы сжатия спектрозональных изображений, с числом
регистрируемых спектральных линий до 64 с повышением эффективности сжатия за
счет обработки в направлении спектральных линий («межкадровой» обработки).
Разработка принципа Голомба для сжатия источников с большим алфавитом и
построение схемы эффективного сжимающего кодирования одномодальных источников.
Были выполнены
исследования эффективности
покомпонентного сжатия спектрозональных изображений. Разработана
эффективная процедура покомпонентного сжатия с возможностью расширения
использованного подхода для межкомпонентного сжатия. Проведена проверка
разработанной технологии сжатия на реальных изображениях, оптимизация
программного обеспечения.
В ходе выполнения проекта было показано, что
сжатие, реализованное независимо по спектральным компонентам, может обеспечить эффективность
от 2:1 до 2.5:1 без потери качества восстановленного изображения.
Были разработаны портируемые
программные средства для сжатия моноспектральных изображений, способные
функционировать в реальном времени на доступных DSP и
процессорах общего назначения.
Основные результаты
представлены в докладе на выездном семинаре ИКИ РАН “Современные и
перспективные разработки и технологии в космическом приборостроении” и в
сборнике научных статей «Современные проблемы дистанционного зондирования Земли
из космоса», Москва, Полиграф сервис, 2004, с.330-332.
Руководитель
работы: старший научный сотрудник, к.т.н.
В.Ф.Бабкин, тел. 333-3589,
e-mail: vbabkin@iki.rssi.ru
Работы по автоматизации научно-производственной деятельности
института.
В ходе выполнения работ по
настоящему этапу был создан и опробован рабочий макет системы, реализующей
единую информационную среду для выполнения всех основных процедур научно-организационного
характера. Система предназначена для автоматизированного ведения планов и
отчетов Института, проведения внутриинститутских конкурсов и решения других,
типичных для академических институтов задач. Все данные системы хранятся во
внутренней реляционной базе данных, что обеспечивает расширенные возможности
поиска необходимой информации. Для проведения детального учета в систему
включены средства интеграции с базами данных административных подразделений, а
для информирования научной общественности об основных работах Института
средства автоматической публикации в Интернет. Опыт пробной эксплуатации системы показал целесообразность
создания системы из нескольких реляционных баз данных и интеграции их.
Работы по системному обеспечению и
информационной поддержке Интернет-служб
ИКИ.
Проводилась регулярная
работа по обеспечению безопасности функционирования системного программного
обеспечения серверов и клиентов архива данных, серверов телематических служб
института.
Работы
по анализу, визуализации и распространению данных сетевого трафика.
Выполнено создание
прототипа и тестовая эксплуатация программно-аппаратного комплекса по анализу,
визуализации и распространению данных сетевого трафика.
Приложение Ntmd для сбора и предварительно
кластеризации данных сетевого трафика из программного пакета «Ntmtools» было расширено следующими
функциями:
1.
Экспорт данных из одной активной задачи в другую,
который позволяет создавать каскадные наборы с различной степенью детализации
при агрегировании.
2.
Регулятор скорости формирования выходных данных,
который динамически подбирает параметры адаптивного агрегирования таким
образом, чтобы средняя скорость данных на выходе равнялась заранее определенной
величине. Данная функция позволяет согласовать поток данных на выходе подсистемы
первичного агрегирования с производительностью системы вторичного
агрегирования.
Был создан макет прототипа
системы, который осуществляет сборку и обработку данных сетевого трафика
(пакеты NetFlow с
магистральных маршрутизаторов сети RbNET). Исходные данные поступают на последовательный каскад
обрабатывающих правил, формируя суточную, недельную и месячную сетевую
статистику, которая сохраняется в файлах на диске. По сути, каждое последующее
агрегирующее правило осуществляет вторичную обработку данных, поступающих с
предыдущего правила.
Была спроектирована и частично
реализована подсистема вторичной кластеризации по «методу адаптивного
агрегирования» на базе реляционной СУБД. К настоящему моменту полностью создана
структура базы и частично реализованы хранимые процедуры, осуществляющие
вторичную обработку.
К настоящему моменту
сформировалась конечная архитектура системы, показанная на рисунке. Данные
могут поступать как непосредственно с сетевого оборудования, так и с
промежуточного Агента, производящего предварительную кластеризацию и
реализованного с помощью программного пакета «Ntmtools». Данные принимаются
диспетчером системы управления и передаются на вычислительный массив для
вторичной кластеризации, после чего сохраняются в реляционной СУБД Mysql и становятся доступными
внешним пользователям через «Подсистему доступа» с WEB интерфейсом.
Разработка
информационно-телекоммуникационных
технологий обеспечения совместной научной деятельности взаимоудаленных научных коллективов.
Разработана и внедрена в эксплуатацию методика
проведения и отображения в сети Интернет научных мероприятий.
С использованием данной методики в текущем году был
проведен ряд научных мероприятий, включая 8 институтских семинаров, 2 выездных
- в Тарусе и Петрозаводске, а также Дни космической науки, междисциплинарный
семинар в Пущино, Всероссийская конференция по Дистанционному зондированию
Земли из космоса и другие. Для всех этих мероприятий были разработаны и
поддерживаются веб-сайты с полным набором информации.
Тема КОСМОС.
Модернизация и развитие научной космической сети «КОСМОС» на базе технологии
Gigabit Ethernet. Научный руководитель д.т.н. Р.Р. Назиров
За отчетный период была построена
Gigabit-вертикаль, соединяющая сетевые сегменты, расположенные на различных
этажах здания Института. В соответствии с
планом поэтапной интеграции
технологии Gigabit Ethernet в существующую инфраструктуру сети, была
произведена частичная модернизация кабельной системы и замена активного
оборудования для дальнейшего расширения сегмента Gigabit, который будет охватывать
магистраль сети “КОСМОС”, а также внешние соединения. В течение отчетного
периода осуществлялся круглосуточный мониторинг активного сетевого оборудования
работающего сегмента Gigabit Ethernet.
За 2004 год была разработана и
частично реализована архитектура распределенного файлового хранилища высокой
доступности. Работа данного хранилища использует активную репликацию данных по свободным
дисковым ресурсам, доступным в локальной сети. Повышенная нагрузка на сетевые
ресурсы, связанная с работой хранилища, делает целесообразным использование
строящего сегмента Gigabit в качестве транспортной базы для данного приложения.